Build Your Own Self Driving Vehicle with Java: Difference between revisions
Jump to navigation
Jump to search








No edit summary |
No edit summary |
||
| (8 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
{{PageSequence|prev=SMWConTalk2019-09|next=SMWConTalk2020-04|category=talk|categoryIcon=picture-o}} | {{PageSequence|prev=SMWConTalk2019-09|next=SMWConTalk2020-04|category=talk|categoryIcon=picture-o}} {{ShowSlides}} | ||
<slideshow style="bitplan" headingmark="⌘⌘" incmark="…" scaled="true" font="Comic Sans MS, Calibri, cursive" > | <slideshow style="bitplan" headingmark="⌘⌘" incmark="…" scaled="true" font="Comic Sans MS, Calibri, cursive" > | ||
;title: [[File:BITPlanLogoFontLessTransparent.png|240px|link=http://www.bitplan.com|BITPlan]]<br>[[File:WolfgangFahl.png|200px|left|link=https://programm.javaland.eu/2020/#/speaker/386323|Wolfgang Fahl]]<br><span style='font-size:150%'>Newcomer: Build Your Own Self Driving Vehicle with Java</span> | ;title: [[File:BITPlanLogoFontLessTransparent.png|240px|link=http://www.bitplan.com|BITPlan]]<br>[[File:WolfgangFahl.png|200px|left|link=https://programm.javaland.eu/2020/#/speaker/386323|Wolfgang Fahl]]<br><span style='font-size:150%'>Newcomer: Build Your Own Self Driving Vehicle with Java</span> | ||
| Line 86: | Line 87: | ||
== ⌘⌘ Software - Vert.X == | == ⌘⌘ Software - Vert.X == | ||
{{Link|target=Vert.x}} | {{Link|target=Vert.x}} | ||
http://tutorials.jenkov.com/images/vertx/vertx-overview-2.png see [http://tutorials.jenkov.com/vert.x/overview.html Jenkov Tutorials] | |||
{| class="wikitable sortable" | {| class="wikitable sortable" | ||
|- | |- | ||
| Line 110: | Line 114: | ||
| 10 || webcontrol || [[File:BossHogg.png]] || {{Done}} || Boss Hogg || {{Done}} || Application to provide manual inputs | | 10 || webcontrol || [[File:BossHogg.png]] || {{Done}} || Boss Hogg || {{Done}} || Application to provide manual inputs | ||
|} | |} | ||
== ⌘⌘ Software - RxJava == | |||
{{Link|target=RxJava}} | |||
* http://reactivex.io/documentation/operators/images/publishRefCount.c.png see [http://reactivex.io/documentation/operators/refcount.html refcount operator] | |||
* http://diagrams.bitplan.com/render/png/0x3b4f6cd2.png | |||
== ⌘⌘ Software - OpenCV == | == ⌘⌘ Software - OpenCV == | ||
[[File:PlayChessWithAWebCam2019-10-26.png|400px|link=https://github.com/WolfgangFahl/play-chess-with-a-webcam]] | [[File:PlayChessWithAWebCam2019-10-26.png|400px|link=https://github.com/WolfgangFahl/play-chess-with-a-webcam]] | ||
| Line 118: | Line 128: | ||
* Probabilistic | * Probabilistic | ||
* Standard | * Standard | ||
== ⌘⌘ Software - OpenCV - Camera Calibration == | |||
{{Link|target=Self_Driving_RC_Car/CameraCalibration}} | |||
[[File:lines_2020-01-13154553.jpg]] | |||
[[File:birdseye_2020-01-13154553.jpg]] | |||
[[File:edges_2020-01-13154553.jpg]] | |||
[[File:camera_2020-01-13154553.jpg]] | |||
== ⌘⌘ Konzeptionelle Integrität == | == ⌘⌘ Konzeptionelle Integrität == | ||
{{Svg|url=2/2c/Dukeschars.svg|width=900|height=900}} | {{Svg|url=2/2c/Dukeschars.svg|width=900|height=900}} | ||
== ⌘⌘ Software - Steuerungs-App == | |||
{{Link|target=Self_Driving_RC_Car/App}} | |||
[[File:DukesScreenShot2020-01-07.png|1280px]] | |||
== ⌘⌘ Probeläufe == | == ⌘⌘ Probeläufe == | ||
{| | {| | ||
| Line 143: | Line 162: | ||
* [http://veins.car2x.org/ Veins] | * [http://veins.car2x.org/ Veins] | ||
|} | |} | ||
== ⌘⌘ Dash2 == | |||
{{Link|target=Dash}} | |||
Dash2 = Dash + VERT.X Verticle | |||
[[File:generallee2020-01-16sim.png|400px]] | |||
[[File:DashRC-Dukes2020-01-15.png|800px]] | |||
== ⌘⌘ PIT-Manöver == | == ⌘⌘ PIT-Manöver == | ||
| Line 152: | Line 177: | ||
* Verbrecherautos mit Anti-PIT Software? | * Verbrecherautos mit Anti-PIT Software? | ||
|} | |} | ||
== ⌘⌘ Sicherheit == | == ⌘⌘ Sicherheit == | ||
Latest revision as of 12:42, 19 April 2023
view Build Your Own Self Driving Vehicle with Java as slides
<slideshow style="bitplan" headingmark="⌘⌘" incmark="…" scaled="true" font="Comic Sans MS, Calibri, cursive" >
- title


Newcomer: Build Your Own Self Driving Vehicle with Java- author
Wolfgang Fahl info@bitplan.com- footer
- JavaLand 2021 Build Your Own Self Driving Vehicle with Java
- subfooter
- Dienstag, 16. März, 14:00-14:40 Quantum 3
</slideshow>
⌘⌘ Der Wettbewerb
<HTML5video>full_run</HTML5video> http://diagrams.bitplan.com/render/png/0x7d4425dc.png
⌘⌘ Demo
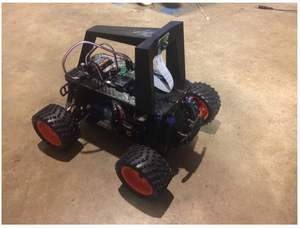
⌘⌘ Die Autos

- 1:10 Modellauto
- Ferrari 360 Challenge Stradale / Ford 150-SVT
- Raspberry Pi
- Kamera Pi oder Webcam
- Servosteuerung Pi oder Adafruit
Coole Projekte z.B. bei Dräger
⌘⌘ Self Driving Car Open Source
- https://github.com/topics/self-driving-car
- https://github.com/topics/self-driving-car?l=java
- https://www.intorobotics.com/the-best-raspberry-pi-3-advanced-and-starter-kits-for-robotics/

⌘⌘ Selbstfahrende Autos
⌘⌘ Das rc-dukes Projekt
https://github.com/rc-dukes/dukes
⌘⌘ Das Team

| |||
|---|---|---|---|
| Bert-Jan |  |

| |
| Tim |  |
||
| Wolfgang |  |

| |
⌘⌘ Komponenten
| Software | Elektronik | Mechanik |
|---|---|---|

|
|
|
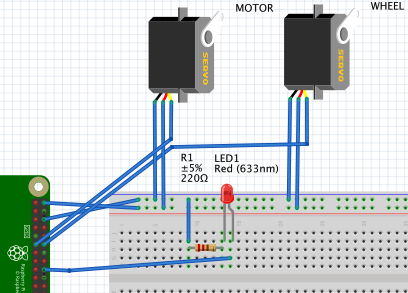
⌘⌘ Bauteile - Elektronik / Mechanik
 |
 |

| |
 |
 |
... | |
| ... | ... | ... |
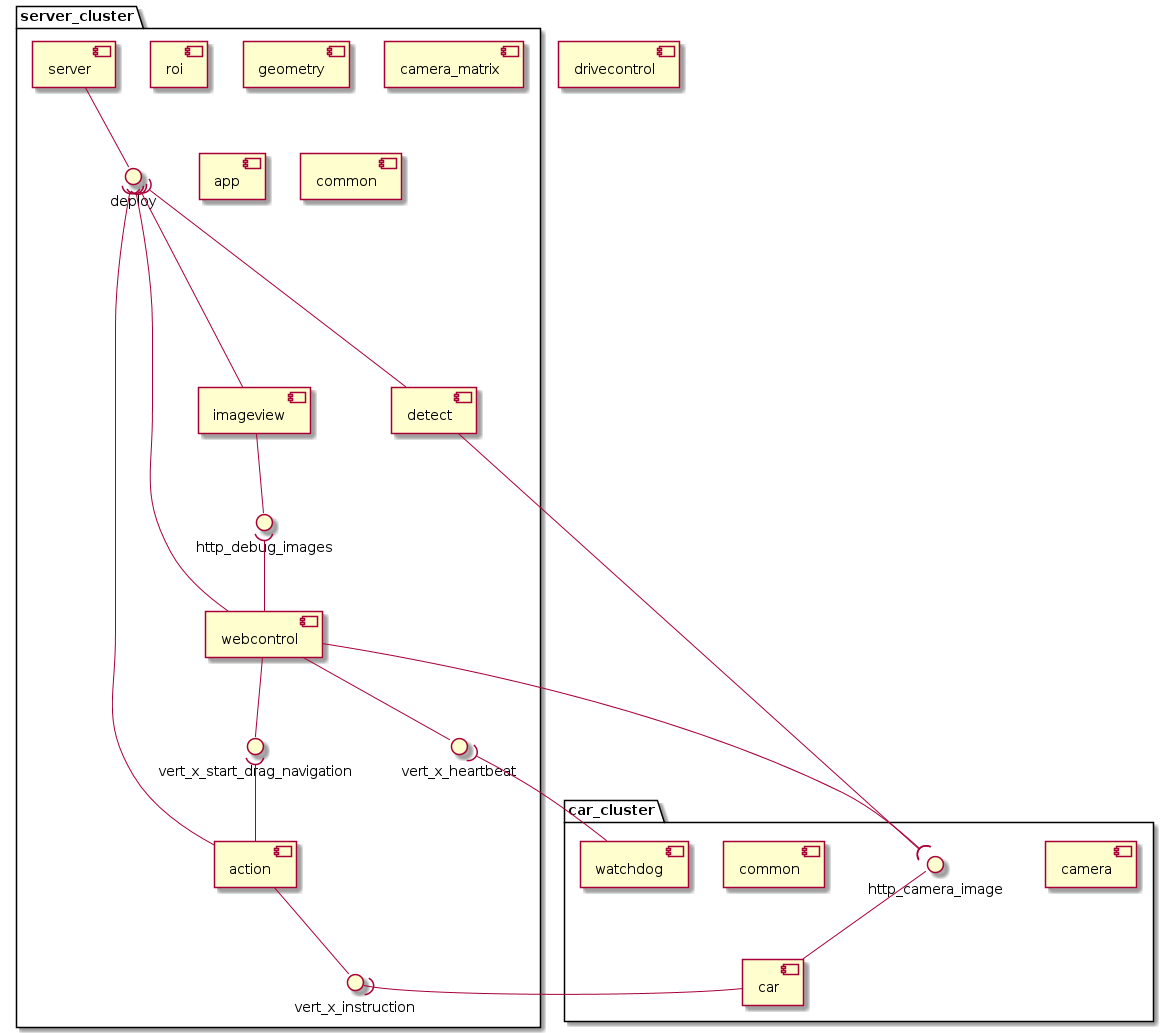
⌘⌘ Systemkontext - Software
Self_Driving_RC_Car/Systemcontext http://diagrams.bitplan.com/render/png/0xa7a576a7.png
⌘⌘ Software - Vert.X
http://tutorials.jenkov.com/images/vertx/vertx-overview-2.png see Jenkov Tutorials
| # | module | DukesVerticle | Character | tests | responsibility | |
|---|---|---|---|---|---|---|
| 1 | action |  |
✓ | Luke | ✓ | Proc Image analysis results into actions |
| 2 | app |  |
✓ | Uncle Jesse | JavaFX app to monitor the car | |
| 3 | car |  |
✓ | Bo | Processing Car control inputs | |
| 4 | camera-matrix |  |
❌ | Cooter | CameraMatrix and PerspectiveShift | |
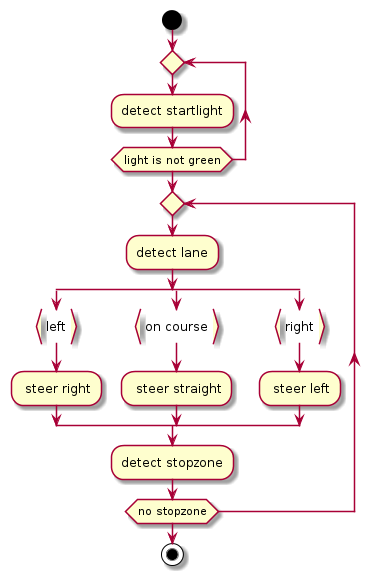
| 5 | detect |  |
✓ | Daisy | Detectors - e.g. Lane and StartLight | |
| 6 | geometry |  |
❌ | Enos | Geometry | |
| 7 | imageview |  |
✓ | Rosco | lane detection debug image web server | |
| 8 | roi |  |
❌ | Cletus | Region of Interest | |
| 9 | watchdog |  |
✓ | Flash | ✓ | Heartbeat controller watchdog |
| 10 | webcontrol |  |
✓ | Boss Hogg | ✓ | Application to provide manual inputs |
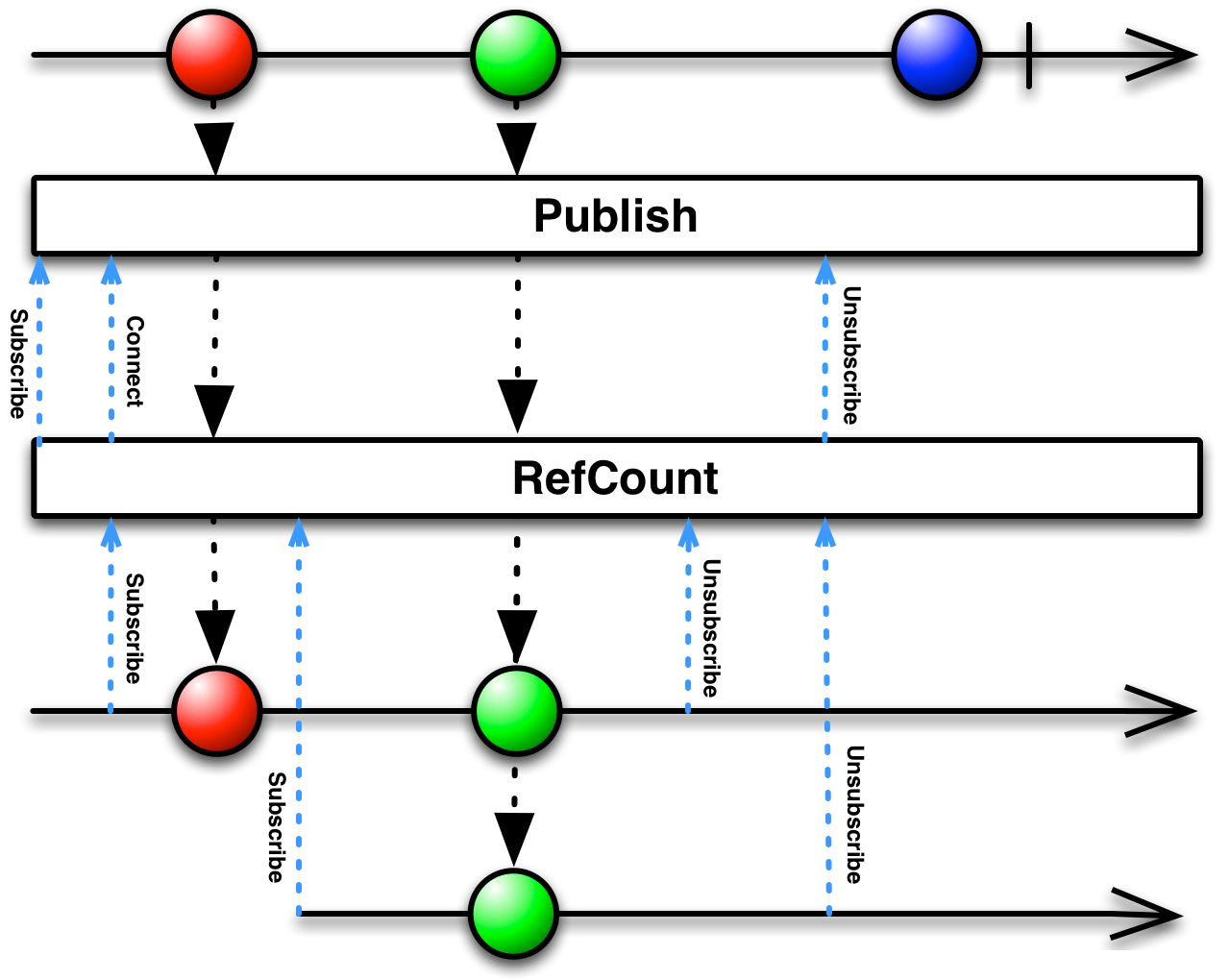
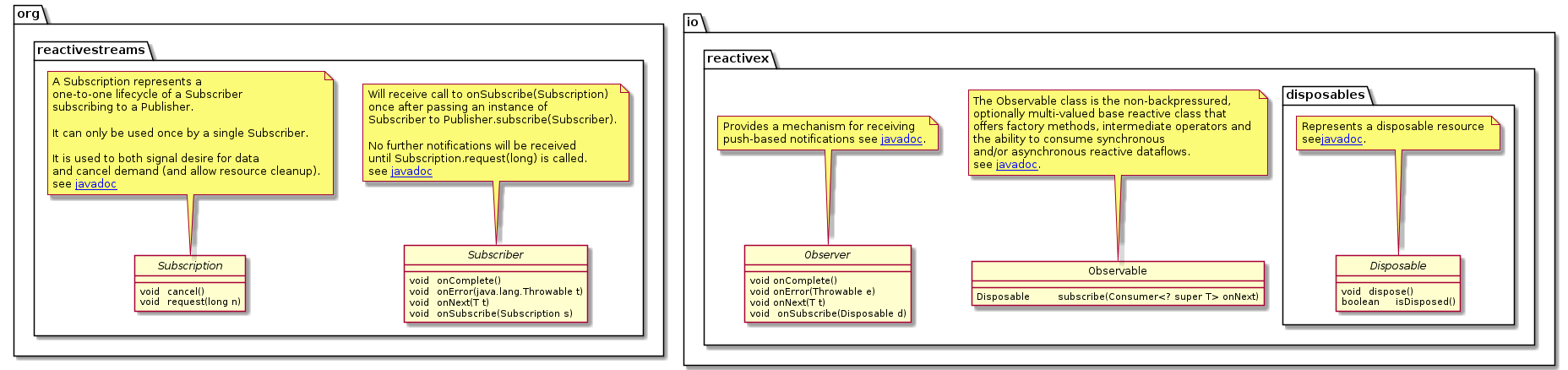
⌘⌘ Software - RxJava
- http://reactivex.io/documentation/operators/images/publishRefCount.c.png see refcount operator
- http://diagrams.bitplan.com/render/png/0x3b4f6cd2.png
⌘⌘ Software - OpenCV
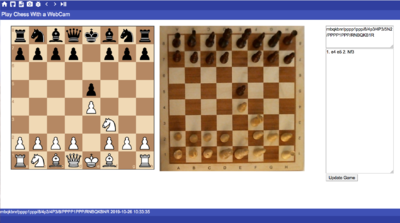


- Play Chess With a Web Cam Projekt
- Hough Lines Detection
- Probabilistic
- Standard
⌘⌘ Software - OpenCV - Camera Calibration
Self_Driving_RC_Car/CameraCalibration




⌘⌘ Konzeptionelle Integrität
⌘⌘ Software - Steuerungs-App

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
⌘⌘ Probeläufe
|
⌘⌘ Fahrzeug Simulation
⌘⌘ Dash2
Dash
Dash2 = Dash + VERT.X Verticle


⌘⌘ PIT-Manöver
|
⌘⌘ Sicherheit
⌘⌘ Unfallrisiko und Unfalluntersuchung
| ✝ | seit | Pflichtuntersuchung | |
|---|---|---|---|
| ✈ | 1 x | 1944 | BFU, NTSB, TSB, BEA, ... |
| 🚆 | 10 x | 1994 | BEU, NTSB, ERA |
| 🚢 | 50 x | 1878 | Seeamt |
| 🚌 | 8 x | ❌ | ÖU,UDV |
| 🚗 | 60 x | ||
| 🚲 | 900 x | ||
| 🏍 | 2200 x |
⌘⌘ Zugänglichkeit

⌘⌘ Lab
⌘⌘ Weitere Links
- Unfallstatistiken
- https://www.donkeycar.com/
- https://www.amazon.com/dp/B07JMHRKQG

⌘⌘ Präsentationen
⌘⌘ Youtube Videos