Build Your Own Self Driving Vehicle with Java: Difference between revisions
Jump to navigation
Jump to search








No edit summary |
No edit summary |
||
| (32 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
{{PageSequence|prev=SMWConTalk2019-09|next=|category=talk|categoryIcon=picture-o}} | {{PageSequence|prev=SMWConTalk2019-09|next=SMWConTalk2020-04|category=talk|categoryIcon=picture-o}} {{ShowSlides}} | ||
<slideshow style="bitplan" headingmark="⌘⌘" incmark="…" scaled="true" font="Comic Sans MS, Calibri, cursive" > | <slideshow style="bitplan" headingmark="⌘⌘" incmark="…" scaled="true" font="Comic Sans MS, Calibri, cursive" > | ||
;title: [[File:BITPlanLogoFontLessTransparent.png|240px|link=http://www.bitplan.com|BITPlan]]<br>[[File:WolfgangFahl.png|200px|left|link=https://programm.javaland.eu/2020/#/speaker/386323|Wolfgang Fahl]]<br><span style='font-size:150%'>Newcomer: Build Your Own Self Driving Vehicle with Java</span> | ;title: [[File:BITPlanLogoFontLessTransparent.png|240px|link=http://www.bitplan.com|BITPlan]]<br>[[File:WolfgangFahl.png|200px|left|link=https://programm.javaland.eu/2020/#/speaker/386323|Wolfgang Fahl]]<br><span style='font-size:150%'>Newcomer: Build Your Own Self Driving Vehicle with Java</span> | ||
;author: <span style='font-size:50%'><br>[https://programm.javaland.eu/2020/#/speaker/386323 Wolfgang Fahl] [mailto:info@bitplan.com info@bitplan.com]</span> | ;author: <span style='font-size:50%'><br>[https://programm.javaland.eu/2020/#/speaker/386323 Wolfgang Fahl] [mailto:info@bitplan.com info@bitplan.com]</span> | ||
;footer: | ;footer: [https://programm.javaland.eu/2021/#/scheduledEvent/606752 JavaLand 2021 Build Your Own Self Driving Vehicle with Java] | ||
;subfooter: Dienstag, 16. März, 14:00-14:40 Quantum 3 | |||
</slideshow> | </slideshow> | ||
== ⌘⌘ Der Wettbewerb == | |||
<HTML5video>full_run</HTML5video> | |||
http://diagrams.bitplan.com/render/png/0x7d4425dc.png | |||
== ⌘⌘ Demo == | |||
{{Video|video=DukesDemo|width=720|height=540}} | |||
== ⌘⌘ Die Autos == | |||
[[File:RC10FerrariUtrecht.JPG|240px|link=https://programm.javaland.eu/2020/#/scheduledEvent/590415|left]][[File:FordRC10.png|400px|right]] | |||
* [https://www.tamiya.de/de/produkte/rc-modelle/rc-on-road-24-wd/1-10-rc-ferrari-laferrari-tt-02-300058582/ 1:10 Modellauto] | |||
* [https://de.wikipedia.org/wiki/Ferrari_360#F360_Challenge_Stradale Ferrari 360 Challenge Stradale] / [https://en.wikipedia.org/wiki/Ford_F-Series#SVT_Lightning_(1993-1995;_1999-2004) Ford 150-SVT] | |||
* [https://www.raspberrypi.org/ Raspberry Pi] | |||
* Kamera [https://projects.raspberrypi.org/en/projects/getting-started-with-picamera Pi] oder [https://www.logitech.com/de-de/product/hd-webcam-c615 Webcam] | |||
* Servosteuerung [http://wiki.bitplan.com/index.php/SG90-Servo Pi] oder [http://wiki.bitplan.com/index.php/PCA9685 Adafruit] | |||
<div class='notes' id='note 1'> | |||
Coole Projekte z.B. bei Dräger | |||
</div> | |||
== ⌘⌘ Self Driving Car Open Source == | |||
* https://github.com/topics/self-driving-car | |||
* https://github.com/topics/self-driving-car?l=java | |||
* https://www.intorobotics.com/the-best-raspberry-pi-3-advanced-and-starter-kits-for-robotics/ | |||
[[File:SacusaCar.jpeg|link=https://github.com/Sacusa/Self-Driving-Car|300px]] | |||
[[File:Donkey2.png|link=https://github.com/autorope/donkeycar|300px]] | |||
== ⌘⌘ Selbstfahrende Autos == | |||
[[File:beandrive.png|480px|link=https://youtu.be/VjLRTifjpxA|Mr Bean|left]] | |||
{{Video|video=drive|width=640|height=480}} | |||
== ⌘⌘ Das rc-dukes Projekt == | |||
[[File:Generallee2020-01-16.png|link=https://github.com/rc-dukes/dukes|Dukes of Hazzard self driving RC car|right]] | |||
https://github.com/rc-dukes/dukes | |||
{{Video|video=Dukes-cut|width=640|height=480}} | |||
== ⌘⌘ Das Team == | |||
{| | |||
|- | |||
| | |||
| | |||
| | |||
!rowspan="4"|[[File:Teilnehmer3.JPG|600px|BITPlan Trainings-Teilnehmer|link=http://training.bitplan.com]] | |||
|- | |||
| [https://www.linkedin.com/in/bjschrijver/ Bert-Jan] || [[File:BertJanRound.png|link=https://github.com/bertjan|150px|Jan]] || [[File:openvaluelogo.png|150px|link=https://www.openvalue.nl/|Open Value]] | |||
|- | |||
| [https://www.linkedin.com/in/tvaneijndhoven/ Tim] || [[File:TimRound.png|150 px|Tim|link=https://github.com/timve]] || [[File:jpointlogo.png|150px|JPoint|link=https://www.jpoint.nl/]] | |||
|- | |||
| [http://www.bitplan.com/index.php/Wolfgang_Fahl Wolfgang] || [[File:WolfgangFahl.png|150px|Wolfgang|link=https://github.com/WolfgangFahl]] || [[File:BITPlanLogoFontLessTransparent.png|150px|link=http://www.bitplan.com]] | |||
|- | |||
| || || | |||
|} | |||
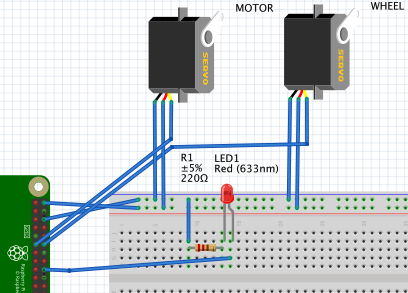
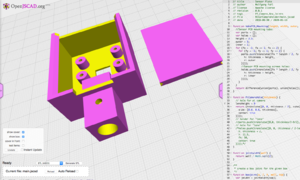
== ⌘⌘ Komponenten == | |||
{| | |||
|- | |||
! Software !! Elektronik !! Mechanik | |||
|- | |||
| [[File:Vertx-Logo-sm.png|200px|link=http://wiki.bitplan.com/index.php/Vert.x]]<br>[[File:Rxjavalogo.png|200px|link=https://github.com/ReactiveX/RxJava]] | |||
[[File:OpenCV_Logo_with_text.png|200px|link=http://wiki.bitplan.com/index.php/OpenCV|OpenCV]] | |||
| [[File:RcCarWiring2019-06-22.png|link=http://wiki.bitplan.com/index.php/SG90-Servo|Servo control]][[File:PCA9685 Servotreiber x700.jpg|link=http://wiki.bitplan.com/index.php/PCA9685|150px|Adafruit 16 channel PWM servo driver]] | |||
| [[File:RCCar-IMG_3566free.png|300px]][[File:cameraholder.png|300px|link=https://openjscad.org/#http://openjscad.org/examples/slices/tor.jscad]] | |||
|} | |||
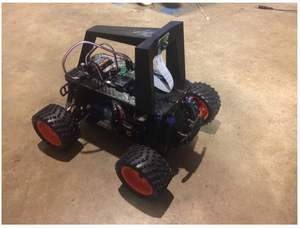
== ⌘⌘ Bauteile - Elektronik / Mechanik == | |||
{| | |||
|- | |||
| || [[File:RC Car Chassis 2019-06-07.jpeg|150px|link=http://wiki.bitplan.com/index.php/Self_Driving_RC_Car#tab=Parts_List|Chassis]] || [[File:SpeedControl_2019-06-06.jpg|150px|link=http://wiki.bitplan.com/index.php/Self_Driving_RC_Car#tab=Parts_List|Speed Control]] || [[File:RC Car Servo 2019-06-06.jpg|150px|link=http://wiki.bitplan.com/index.php/Self_Driving_RC_Car#tab=Parts_List|Servo]] | |||
|- | |||
| || [[File:713LX1Z383L._SL1500_.jpg|150px|link=http://wiki.bitplan.com/index.php/Self_Driving_RC_Car#tab=Parts_List|Raspberry PI]] || [[File:TopFuel-LiPo-25C-ECO-X-1300mAh-3S-21300341 b 0.JPG|150px|link=http://wiki.bitplan.com/index.php/Self_Driving_RC_Car#tab=Parts_List|Battery]] || ... | |||
|- | |||
| || ... || ... || ... | |||
|} | |||
{{Link|target=Self_Driving_RC_Car/Parts-List|title=Teileliste}} | |||
== ⌘⌘ Systemkontext - Software == | |||
{{Link|target=Self_Driving_RC_Car/Systemcontext}} | |||
http://diagrams.bitplan.com/render/png/0xa7a576a7.png | |||
== ⌘⌘ Software - Vert.X == | |||
{{Link|target=Vert.x}} | |||
http://tutorials.jenkov.com/images/vertx/vertx-overview-2.png see [http://tutorials.jenkov.com/vert.x/overview.html Jenkov Tutorials] | |||
{| class="wikitable sortable" | |||
|- | |||
! # !! module !! !! DukesVerticle !! Character !! tests !! responsibility | |||
|- | |||
| 1 || [https://rc-dukes.github.io/dukes/dukes/apidocs/nl/vaneijndhoven/dukes/action/package-summary.html action] || [[File:Luke.png]] || {{Done}} || Luke || {{Done}} || Proc Image analysis results into actions | |||
|- | |||
| 2 || app || [[File:Unclejesse.png]] || {{Done}} || Uncle Jesse || || JavaFX app to monitor the car | |||
|- | |||
| 3 || car || [[File:Bo.png]] || {{Done}} || Bo || || Processing Car control inputs | |||
|- | |||
| 4 || camera-matrix || [[File:Cooter.png]] || ❌ || Cooter || || CameraMatrix and PerspectiveShift | |||
|- | |||
| 5 || detect || [[File:Daisy.png]] || {{Done}} || Daisy || || Detectors - e.g. Lane and StartLight | |||
|- | |||
| 6 || geometry || [[File:Enos.png]] || ❌ || Enos || || Geometry | |||
|- | |||
| 7 || imageview || [[File:Rosco.png]] || {{Done}} || Rosco || || lane detection debug image web server | |||
|- | |||
| 8 || roi || [[File:Cletus.png]] || ❌ || Cletus || || Region of Interest | |||
|- | |||
| 9 || watchdog || [[File:Flash.png]] || {{Done}} || Flash || {{Done}} || Heartbeat controller watchdog | |||
|- | |||
| 10 || webcontrol || [[File:BossHogg.png]] || {{Done}} || Boss Hogg || {{Done}} || Application to provide manual inputs | |||
|} | |||
== ⌘⌘ Software - RxJava == | |||
{{Link|target=RxJava}} | |||
* http://reactivex.io/documentation/operators/images/publishRefCount.c.png see [http://reactivex.io/documentation/operators/refcount.html refcount operator] | |||
* http://diagrams.bitplan.com/render/png/0x3b4f6cd2.png | |||
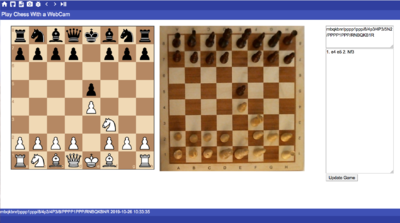
== ⌘⌘ Software - OpenCV == | |||
[[File:PlayChessWithAWebCam2019-10-26.png|400px|link=https://github.com/WolfgangFahl/play-chess-with-a-webcam]] | |||
[[File:detectedProbabilisticHough2019-10-21.png|300px]] | |||
[[File:detectedHough2019-10-21.png|300px]] | |||
* [https://github.com/WolfgangFahl/play-chess-with-a-webcam Play Chess With a Web Cam Projekt] | |||
* [http://wiki.bitplan.com/index.php/PlayChessWithAWebCam#hough_lines Hough Lines Detection] | |||
* Probabilistic | |||
* Standard | |||
== ⌘⌘ Software - OpenCV - Camera Calibration == | |||
{{Link|target=Self_Driving_RC_Car/CameraCalibration}} | |||
[[File:lines_2020-01-13154553.jpg]] | |||
[[File:birdseye_2020-01-13154553.jpg]] | |||
[[File:edges_2020-01-13154553.jpg]] | |||
[[File:camera_2020-01-13154553.jpg]] | |||
== ⌘⌘ Konzeptionelle Integrität == | |||
{{Svg|url=2/2c/Dukeschars.svg|width=900|height=900}} | |||
== ⌘⌘ Software - Steuerungs-App == | |||
{{Link|target=Self_Driving_RC_Car/App}} | |||
[[File:DukesScreenShot2020-01-07.png|1280px]] | |||
== ⌘⌘ Probeläufe == | |||
{| | |||
|- | |||
|{{Video|video=RCRun9|width=600|height=600}} | |||
|<br> | |||
* [[File:Stadt-Willich-Logo.svg|150px|title=Stadt Willich|link=https://www.stadt-willich.de/]] Ratssaal der Stadt Willich | |||
* Turnhalle des TV Schiefbahn e.V. | |||
|} | |||
== ⌘⌘ Fahrzeug Simulation == | |||
{| | |||
|- | |||
| {{Video|video=WeebotsHighwayCrash|width=720|height=540}} | |||
|<br> | |||
* [http://wiki.bitplan.com/index.php/Vehicle_simulation_software Übersicht] | |||
* [https://robotbenchmark.net/benchmark/highway_driving/simulation.php?user=1380 Weebots] | |||
* [https://github.com/rc-dukes/dash2 dash2] | |||
* [https://sumo.dlr.de SUMO] | |||
* [https://sumo.dlr.de/docs/TraCI.html TraCI] | |||
* [http://veins.car2x.org/ Veins] | |||
|} | |||
== ⌘⌘ Dash2 == | |||
{{Link|target=Dash}} | |||
Dash2 = Dash + VERT.X Verticle | |||
[[File:generallee2020-01-16sim.png|400px]] | |||
[[File:DashRC-Dukes2020-01-15.png|800px]] | |||
== ⌘⌘ PIT-Manöver == | |||
{| | |||
|- | |||
| {{Video|video=PitManouever|width=640|height=480}} | |||
| <br> | |||
* selbstfahrende Polizei PIT-Chaser? | |||
* Verbrecherautos mit Anti-PIT Software? | |||
|} | |||
== ⌘⌘ Sicherheit == | |||
{| | |||
|- | |||
|{{Video|video=PikesPeakCrash|width=640|height=480}} | |||
|<br> | |||
* [https://en.wikipedia.org/wiki/Vision_Zero Vision Zero] | |||
|} | |||
== ⌘⌘ Unfallrisiko und Unfalluntersuchung == | |||
{| class="wikitable" | |||
|- | |||
! !! {{UtfIcon|utf=✝|size=36|color=black}} !! seit !! Pflichtuntersuchung | |||
|- | |||
| {{UtfIcon|utf=✈|size=64|color=blue}} | |||
| style="text-align:right;" | 1 x | |||
| style="width:100px" | 1944 | |||
| [https://de.wikipedia.org/wiki/Bundesstelle_f%C3%BCr_Flugunfalluntersuchung BFU], [https://ntsb.gov NTSB], [https://www.tsb.gc.ca TSB], [https://www.bea.aero/en/ BEA], ... | |||
|- | |||
| {{UtfIcon|utf=🚆|size=36|color=blue}} | |||
| style="text-align:right;"| 10 x | |||
| 1994 | |||
| [https://www.eisenbahn-unfalluntersuchung.de BEU], [https://ntsb.gov NTSB], [https://www.era.europa.eu ERA] | |||
|- | |||
| {{UtfIcon|utf=🚢|size=36|color=blue}} | |||
| style="text-align:right;"| 50 x | |||
| 1878 | |||
| [https://www.gdws.wsv.bund.de/DE/schifffahrt/01_seeschifffahrt/seeamt/seeamt-node.html Seeamt] | |||
|- | |||
|{{UtfIcon|utf=🚌|size=36|color=blue}} | |||
| style="text-align:right;"| 8 x | |||
! rowspan="4" | ❌ | |||
! rowspan="4" | [https://de.wikipedia.org/wiki/%C3%96rtliche_Unfalluntersuchung ÖU],[https://udv.de/ UDV] | |||
|- | |||
| {{UtfIcon|utf=🚗|size=36|color=blue}} | |||
| style="text-align:right;"| 60 x | |||
|- | |||
| {{UtfIcon|utf=🚲|size=36|color=blue}} | |||
| style="text-align:right;"| 900 x | |||
|- | |||
| {{UtfIcon|utf=🏍|size=36|color=blue}} | |||
| style="text-align:right;"| 2200 x | |||
|} | |||
== ⌘⌘ Zugänglichkeit == | |||
[[File:Wiring-IMG_0035.JPG|960px|target=http://pi-q-robot.bitplan.com/]] | |||
== ⌘⌘ Lab == | |||
[[File:angleplot2019-07-02.png|400px|right|link=http://wiki.bitplan.com/index.php/Ultrasound_Triangulation|Ultrasound Triangulation]] | |||
{{Video|video=20190612_084825|width=640|height=480}} | |||
== ⌘⌘ Weitere Links == | |||
* Unfallstatistiken | |||
** [https://www.destatis.de/DE/Themen/Gesellschaft-Umwelt/Verkehrsunfaelle/Tabellen/liste-strassenverkehrsunfaelle.html Straßenverkehrsunfallstatistik Deutschland] | |||
** [http://www.ijhssnet.com/journals/Vol_5_No_7_1_July_2015/15.pdf Travel Safety: Time versus Distance] | |||
* https://www.donkeycar.com/ | |||
** http://docs.donkeycar.com/supported_cars/ | |||
* https://www.amazon.com/dp/B07JMHRKQG | |||
[[File:DiessRoboterAutos.png|400px]] | |||
== ⌘⌘ Präsentationen == | |||
<youtube>OL0vg1WmI6I</youtube> | |||
<youtube>YeUMtQyvZKM</youtube> | |||
<youtube>vWZZ-c8hDTg</youtube> | |||
== ⌘⌘ Youtube Videos == | |||
<youtube>IWB4xj7EILg</youtube> | |||
<youtube>VjLRTifjpxA</youtube> | |||
<youtube>pUZtAK5jjyE&t=18</youtube> | |||
<youtube>gwAi4wwPnZA</youtube> | |||
<youtube>cB_ez2MNHMo</youtube> | |||
<youtube>BBwEF6WBUQs</youtube> | |||
<youtube>5VBD7hVRhx0</youtube> | |||
[[Category:Talk]] | [[Category:Talk]] | ||
Latest revision as of 12:42, 19 April 2023
view Build Your Own Self Driving Vehicle with Java as slides
<slideshow style="bitplan" headingmark="⌘⌘" incmark="…" scaled="true" font="Comic Sans MS, Calibri, cursive" >
- title


Newcomer: Build Your Own Self Driving Vehicle with Java- author
Wolfgang Fahl info@bitplan.com- footer
- JavaLand 2021 Build Your Own Self Driving Vehicle with Java
- subfooter
- Dienstag, 16. März, 14:00-14:40 Quantum 3
</slideshow>
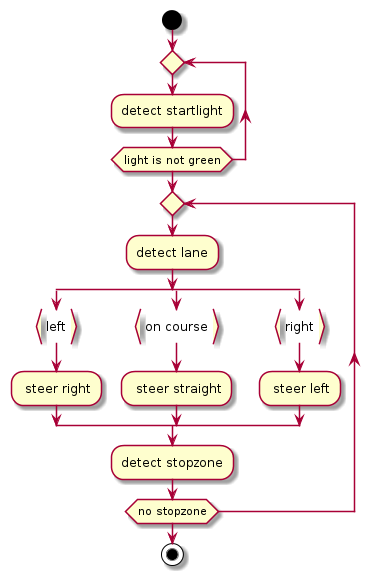
⌘⌘ Der Wettbewerb
<HTML5video>full_run</HTML5video> http://diagrams.bitplan.com/render/png/0x7d4425dc.png
⌘⌘ Demo
⌘⌘ Die Autos

- 1:10 Modellauto
- Ferrari 360 Challenge Stradale / Ford 150-SVT
- Raspberry Pi
- Kamera Pi oder Webcam
- Servosteuerung Pi oder Adafruit
Coole Projekte z.B. bei Dräger
⌘⌘ Self Driving Car Open Source
- https://github.com/topics/self-driving-car
- https://github.com/topics/self-driving-car?l=java
- https://www.intorobotics.com/the-best-raspberry-pi-3-advanced-and-starter-kits-for-robotics/

⌘⌘ Selbstfahrende Autos
⌘⌘ Das rc-dukes Projekt
https://github.com/rc-dukes/dukes
⌘⌘ Das Team

| |||
|---|---|---|---|
| Bert-Jan |  |

| |
| Tim |  |
||
| Wolfgang |  |

| |
⌘⌘ Komponenten
| Software | Elektronik | Mechanik |
|---|---|---|

|
|
|
⌘⌘ Bauteile - Elektronik / Mechanik
 |
 |

| |
 |
 |
... | |
| ... | ... | ... |
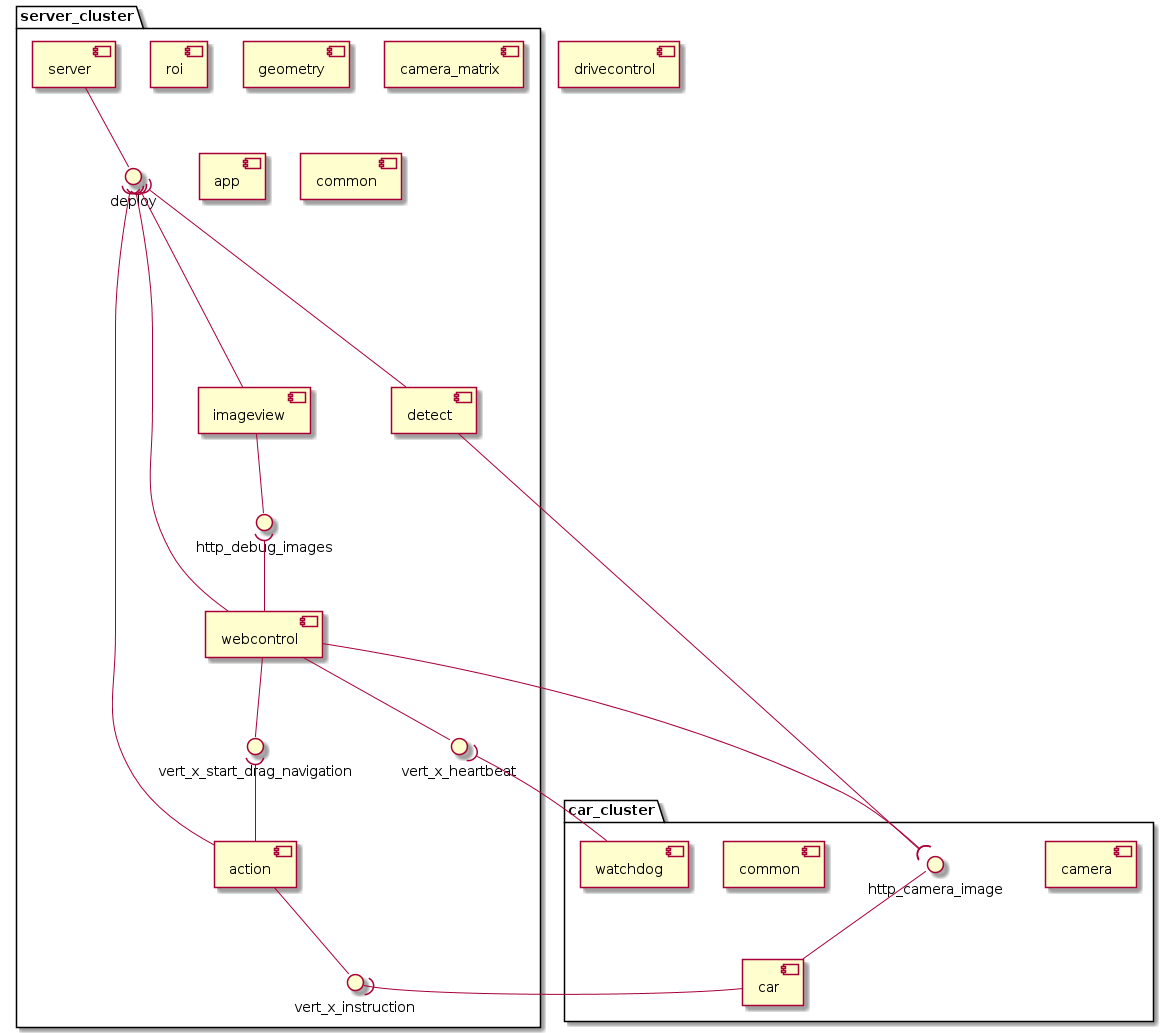
⌘⌘ Systemkontext - Software
Self_Driving_RC_Car/Systemcontext http://diagrams.bitplan.com/render/png/0xa7a576a7.png
⌘⌘ Software - Vert.X
http://tutorials.jenkov.com/images/vertx/vertx-overview-2.png see Jenkov Tutorials
| # | module | DukesVerticle | Character | tests | responsibility | |
|---|---|---|---|---|---|---|
| 1 | action |  |
✓ | Luke | ✓ | Proc Image analysis results into actions |
| 2 | app |  |
✓ | Uncle Jesse | JavaFX app to monitor the car | |
| 3 | car |  |
✓ | Bo | Processing Car control inputs | |
| 4 | camera-matrix |  |
❌ | Cooter | CameraMatrix and PerspectiveShift | |
| 5 | detect |  |
✓ | Daisy | Detectors - e.g. Lane and StartLight | |
| 6 | geometry |  |
❌ | Enos | Geometry | |
| 7 | imageview |  |
✓ | Rosco | lane detection debug image web server | |
| 8 | roi |  |
❌ | Cletus | Region of Interest | |
| 9 | watchdog |  |
✓ | Flash | ✓ | Heartbeat controller watchdog |
| 10 | webcontrol |  |
✓ | Boss Hogg | ✓ | Application to provide manual inputs |
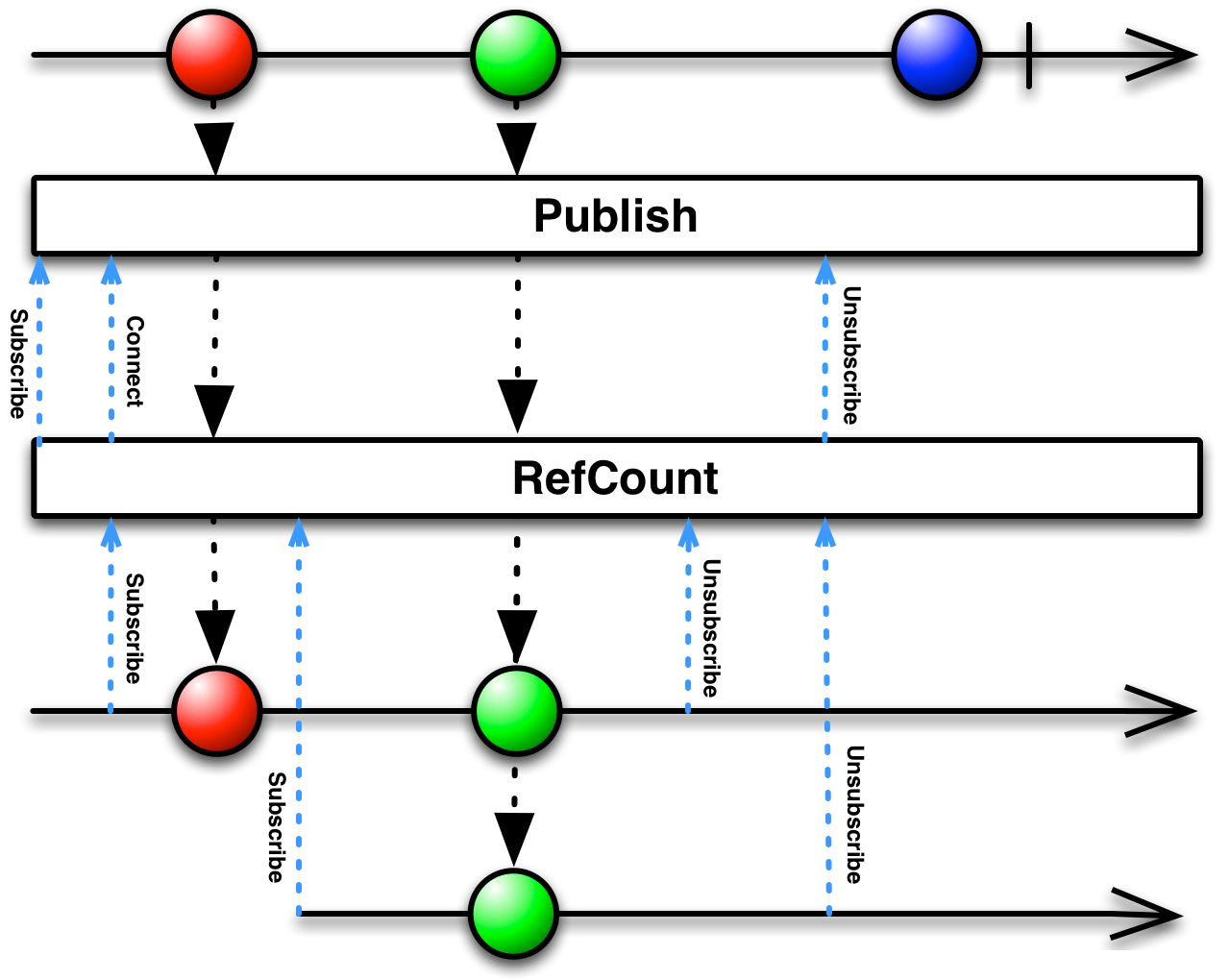
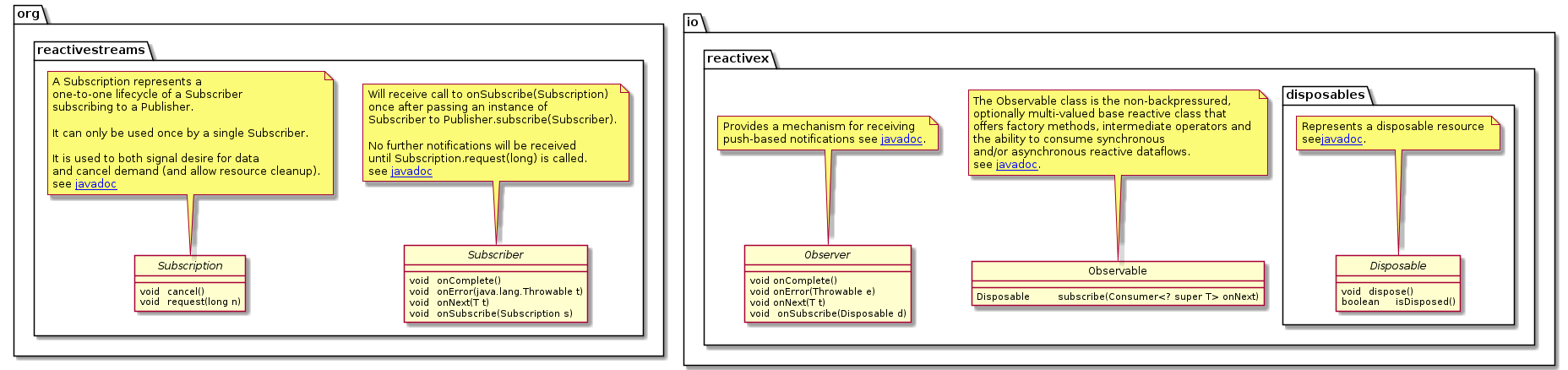
⌘⌘ Software - RxJava
- http://reactivex.io/documentation/operators/images/publishRefCount.c.png see refcount operator
- http://diagrams.bitplan.com/render/png/0x3b4f6cd2.png
⌘⌘ Software - OpenCV


- Play Chess With a Web Cam Projekt
- Hough Lines Detection
- Probabilistic
- Standard
⌘⌘ Software - OpenCV - Camera Calibration
Self_Driving_RC_Car/CameraCalibration




⌘⌘ Konzeptionelle Integrität
⌘⌘ Software - Steuerungs-App

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
⌘⌘ Probeläufe
|
⌘⌘ Fahrzeug Simulation
⌘⌘ Dash2
Dash
Dash2 = Dash + VERT.X Verticle


⌘⌘ PIT-Manöver
|
⌘⌘ Sicherheit
⌘⌘ Unfallrisiko und Unfalluntersuchung
| ✝ | seit | Pflichtuntersuchung | |
|---|---|---|---|
| ✈ | 1 x | 1944 | BFU, NTSB, TSB, BEA, ... |
| 🚆 | 10 x | 1994 | BEU, NTSB, ERA |
| 🚢 | 50 x | 1878 | Seeamt |
| 🚌 | 8 x | ❌ | ÖU,UDV |
| 🚗 | 60 x | ||
| 🚲 | 900 x | ||
| 🏍 | 2200 x |
⌘⌘ Zugänglichkeit

⌘⌘ Lab
⌘⌘ Weitere Links
- Unfallstatistiken
- https://www.donkeycar.com/
- https://www.amazon.com/dp/B07JMHRKQG

⌘⌘ Präsentationen
⌘⌘ Youtube Videos