PlayChessWithAWebCam/Papers: Difference between revisions
| (25 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
see also {{Link|target=PlayChessWithAWebCam}} | see also {{Link|target=PlayChessWithAWebCam}} | ||
= Papers = | = Papers / Projects = | ||
== Convert a physical chessboard into a digital one == | |||
[[CiteRef::SaurabhB 2019-11]] | |||
{{#scite:SaurabhB 2019-11 | |||
|type=article | |||
|url=https://tech.bakkenbaeck.com/post/chessvision | |||
|year=2019 | |||
|Author=Saurabh B | |||
|in=Bakken & Bæck Blog | |||
}} | |||
== Robust Computer Vision Chess Analysis and Interaction with a Humanoid Robot == | == Robust Computer Vision Chess Analysis and Interaction with a Humanoid Robot == | ||
[[CiteRef::Chen 2019]] | [[CiteRef::Chen 2019]] | ||
== Chessboard and chess piece recognition with the support of neural networks == | == Chessboard and chess piece recognition with the support of neural networks == | ||
[[CiteRef::Czyzewski 2018]] | [[CiteRef::Czyzewski 2018]] | ||
{{#scite:Czyzewski 2018 | {{#scite:Czyzewski 2018 | ||
| Line 36: | Line 42: | ||
[[CiteRef::Kuncheva 2018]] | [[CiteRef::Kuncheva 2018]] | ||
{{#scite:Kuncheva 2018 | {{#scite:Kuncheva 2018 | ||
|type=article | |type=article | ||
| Line 46: | Line 52: | ||
|year=2018 | |year=2018 | ||
|pages=7 | |pages=7 | ||
}} | |||
== DE3-ROB1 CHESS Group Documentation == | |||
[[CiteRef::Bernbaum 2018-03]] https://github.com/nebbles/DE3-ROB1-CHESS | |||
{{#scite:Bernbaum 2018-03 | |||
|type=article | |||
|url=https://de3-rob1-chess.readthedocs.io/en/latest/ | |||
|authors=Anna Bernbaum, Benedict Greenberg, Josephine Latreille, Sanish Mistry, Leah Pattison, Paolo Ruegg, Sylvia Zhang | |||
|year=2018 | |||
|title=DE3-ROB1 CHESS Group Documentation | |||
|in=CHESS Project for the Robotics 1 module in Design Engineering, Imperial College London, in March 2018. | |||
}} | }} | ||
| Line 61: | Line 77: | ||
<pdf>chessboard_corner_detection.pdf</pdf> | <pdf>chessboard_corner_detection.pdf</pdf> | ||
== Stonewall Chess Computer Vision == | |||
[[CiteRef::Donald 2017]] | |||
<youtube>uDw_vCNbx-I</youtube> | |||
{{#scite:Donald 2017 | |||
|type=article | |||
|url=http://notsamdonald.com/stonewall | |||
|year=2017 | |||
|Author=Sam Donald | |||
|in=COSC428 University of Canterbury, NZ 2017 | |||
}} | |||
== Chess recognition from a single depth image == | |||
[[CiteRef::Wei 2017-07]] | |||
<pdf>https://htchen.github.io/chess-recognition-single.pdf</pdf> | |||
{{#scite:Wei 2017-07 | |||
|type=article | |||
|url=https://ieeexplore.ieee.org/document/8019453 | |||
|authors=Yu-An Wei, Tzu-Wei Huang, Hwann-Tzong Chen, JenChi Liu | |||
|year=2017 | |||
|title=Chess recognition from a single depth image | |||
|in=2017 IEEE International Conference on Multimedia and Expo (ICME) | |||
|pages=6 | |||
}} | |||
== Chess Recognition Using Computer Vision == | |||
[[CiteRef::Varun 2017-05]] | |||
{{#scite:Varun 2017-05 | |||
|type=article | |||
|title=Chess Recognition Using Computer Vision | |||
|in=College of Engineering & Computer Science, The Australian National University, Canberra, Australia 2017 | |||
|url=https://github.com/SukritGupta17/Chess-Board-Recognition/blob/master/chess_recognition_project_report.pdf | |||
|year=2017 | |||
|authors=Ramani Varun, Sukrit Gupta | |||
|pages=7 | |||
}} | |||
== Geometry-Based Populated Chessboard Recognition == | == Geometry-Based Populated Chessboard Recognition == | ||
| Line 92: | Line 145: | ||
|title=ChessVision: Chess Board and Piece Recognition | |title=ChessVision: Chess Board and Piece Recognition | ||
|in=Standford University CS 231a 2016 Final Report | |in=Standford University CS 231a 2016 Final Report | ||
}} | |||
== Play Chess With a Webcam == | |||
[[CiteRef::Dugas 2015]] | |||
{{#scite:Dugas 2015 | |||
|type=article | |||
|title=Play Chess With a Webcam | |||
|authors=Olivier Dugas, Yannick Hold | |||
|in= Void's Vault - Knowledge source for efficiency. | |||
|year=2015 | |||
|url=http://blogdugas.net/blog/2015/05/18/play-chess-with-a-webcam/ | |||
}} | }} | ||
== Automatic Chess Playing with a Robot Manipulator == | == Automatic Chess Playing with a Robot Manipulator == | ||
[[CiteRef::Angelkov 2015]] | [[CiteRef::Angelkov 2015]] | ||
{{#scite:Angelkov 2015 | {{#scite:Angelkov 2015 | ||
| Line 194: | Line 255: | ||
[[CiteRef::Will 2013]] | [[CiteRef::Will 2013]] | ||
{{#scite:Will 2013 | {{#scite:Will 2013 | ||
|type=article | |type=article | ||
| Line 202: | Line 262: | ||
|url=https://www.ias.informatik.tu-darmstadt.de/uploads/Teaching/AutonomousLearningSystems/Will_ALS_2013.pdf | |url=https://www.ias.informatik.tu-darmstadt.de/uploads/Teaching/AutonomousLearningSystems/Will_ALS_2013.pdf | ||
|in=Department of Computer Science, Autonomous Learning Systems, TU Darmstadt 2013 | |in=Department of Computer Science, Autonomous Learning Systems, TU Darmstadt 2013 | ||
}} | |||
== Human-Robot Chess == | |||
[[CiteRef::Kapoor 2013]] | |||
<pdf>https://robotchess.files.wordpress.com/2013/02/ecesd201213_ece-05_quadchart.pdf</pdf> | |||
<youtube>Dm7TadmuSDg</youtube> | |||
{{#scite:Kapoor 2013 | |||
|type=article | |||
|title=Human-Robot Chess | |||
|authors=Daksh Kapoor, Mayank Gureja, Evan Dissanayake, Anson Jacob | |||
|year=2012 | |||
|url=https://robotchess.wordpress.com | |||
|in=Drexel University Senior Design 2012-13 | |||
}} | }} | ||
| Line 275: | Line 350: | ||
|url=http://people.etf.unsa.ba/~esokic/mypapers/2008ISSPIT.pdf | |url=http://people.etf.unsa.ba/~esokic/mypapers/2008ISSPIT.pdf | ||
|year=2008 | |year=2008 | ||
|pages=5 | |||
}} | }} | ||
== Chess Vision - Real-time tracking of board configuration and chess moves == | == Chess Vision - Real-time tracking of board configuration and chess moves == | ||
[[CiteRef::Huiyan 2007]] | [[CiteRef::Huiyan 2007]] | ||
| Line 309: | Line 386: | ||
|year=2002 | |year=2002 | ||
}} | }} | ||
== Chess-playing robot. Lab course in robot sensor integration == | |||
[[CiteRef::Groen 1992]] | |||
<pdf>1992.Achessplayingrobot.Labcourseinrobotsensorintegration.pdf</pdf> | |||
= References = | = References = | ||
| Line 315: | Line 397: | ||
Clicking on a node will lead you to the paper's details | Clicking on a node will lead you to the paper's details | ||
<graphviz> | <graphviz> | ||
digraph | digraph citations2019 { | ||
rankdir="LR" | rankdir="LR" | ||
Groen1992 [ href="https://www.researchgate.net/publication/3088024_Chess-playing_robot_Lab_course_in_robot_sensor_integration" ] | |||
Cour2002_07 [ href="https://pdfs.semanticscholar.org/57e7/9b85d53597d59a1009ea964876de260935ea.pdf" ] | Cour2002_07 [ href="https://pdfs.semanticscholar.org/57e7/9b85d53597d59a1009ea964876de260935ea.pdf" ] | ||
Blunsden2003 [ href="http://wiki.bitplan.com/index.php/PlayChessWithAWebCam/Papers#Chess_Recognition" ] | |||
Urting2003 [ href="https://www.researchgate.net/publication/220785821_MarineBlue_A_Low-cost_Chess_Robot" ] | Urting2003 [ href="https://www.researchgate.net/publication/220785821_MarineBlue_A_Low-cost_Chess_Robot" ] | ||
Huiyan2007 [ href="https://www.comp.nus.edu.sg/~cs4243/showcase/chess_vision/chess_vision.html" ] | Huiyan2007 [ href="https://www.comp.nus.edu.sg/~cs4243/showcase/chess_vision/chess_vision.html" ] | ||
| Line 338: | Line 422: | ||
Ding2016 [ href="https://web.stanford.edu/class/cs231a/prev_projects_2016/CS_231A_Final_Report.pdf" ] | Ding2016 [ href="https://web.stanford.edu/class/cs231a/prev_projects_2016/CS_231A_Final_Report.pdf" ] | ||
Xie2017 [ href="http://dx.doi.org/10.1117/12.2310081" ] | Xie2017 [ href="http://dx.doi.org/10.1117/12.2310081" ] | ||
Varun2017_05 [ href="https://github.com/SukritGupta17/Chess-Board-Recognition/blob/master/chess_recognition_project_report.pdf" ] | |||
QI2017_08 [ href="http://dx.doi.org/10.1007/978-3-319-65292-4_46" ] | QI2017_08 [ href="http://dx.doi.org/10.1007/978-3-319-65292-4_46" ] | ||
Kuncheva2018 [ href="http://dx.doi.org/10.1016/j.patrec.2018.04.018" ] | Kuncheva2018 [ href="http://dx.doi.org/10.1016/j.patrec.2018.04.018" ] | ||
| Line 343: | Line 428: | ||
Goodloe2018 [ href="https://classes.engineering.wustl.edu/ese205/core/index.php?title=CV_Chess" ] | Goodloe2018 [ href="https://classes.engineering.wustl.edu/ese205/core/index.php?title=CV_Chess" ] | ||
Xie2018_03 [href="http://dx.doi.org/10.1109/WACV.2018.00221"] | Xie2018_03 [href="http://dx.doi.org/10.1109/WACV.2018.00221"] | ||
Oremus2018 [ href="https://is.muni.cz/th/meean/Master_Thesis_twaip.pdf" ] | |||
Chen2019 [ href="http://dx.doi.org/10.3390/computers8010014" ] | Chen2019 [ href="http://dx.doi.org/10.3390/computers8010014" ] | ||
SaurabhB_2019_11 [ href="https://tech.bakkenbaeck.com/post/chessvision" ] | |||
SaurabhB_2019_11 -> Czyzewski2018 | |||
SaurabhB_2019_11 -> Oremus2018 | |||
Chen2019 -> Danner2014 | Chen2019 -> Danner2014 | ||
Chen2019 -> Urting2003 | Chen2019 -> Urting2003 | ||
| Line 353: | Line 442: | ||
Chen2019 -> Matuszek2011 | Chen2019 -> Matuszek2011 | ||
Chen2019 -> Cour2002_07 | Chen2019 -> Cour2002_07 | ||
Oremus2018 -> Danner2014 | |||
Oremus2018 -> Ding2016 | |||
Oremus2018 -> Varun2017_05 | |||
Kuncheva2018 -> Cour2002_07 | Kuncheva2018 -> Cour2002_07 | ||
Kuncheva2018 -> Danner2014 | Kuncheva2018 -> Danner2014 | ||
| Line 378: | Line 470: | ||
Xie2017 -> Banerjee2012 | Xie2017 -> Banerjee2012 | ||
Xie2017 -> Tam2008_01 | Xie2017 -> Tam2008_01 | ||
Varun2017_05 -> Ding2016 | |||
Varun2017_05 -> Danner2014 | |||
Varun2017_05 -> Banerjee2012 | |||
Varun2017_05 -> Koray2016 | |||
Unger2014_07 -> Matuszek2011 | Unger2014_07 -> Matuszek2011 | ||
Unger2014_07 -> Urting2003 | Unger2014_07 -> Urting2003 | ||
| Line 409: | Line 505: | ||
Banerjee2012 -> Matuszek2011 | Banerjee2012 -> Matuszek2011 | ||
Banerjee2012 -> Sokic2008 | Banerjee2012 -> Sokic2008 | ||
Neufeld2010 -> Sokic2008 | |||
Neufeld2010 -> Tam2008_01 | |||
Neufeld2010 -> Blunsden2003 | |||
Neufeld2010 -> Cour2002_07 | |||
Neufeld2010 -> Groen1992 | |||
Huiyan2007 -> Urting2003 | |||
} | } | ||
</graphviz> | </graphviz> | ||
Latest revision as of 06:48, 29 December 2019
see also PlayChessWithAWebCam
Papers / Projects
Convert a physical chessboard into a digital one
SaurabhB 2019-11 {{#scite:SaurabhB 2019-11
|type=article |url=https://tech.bakkenbaeck.com/post/chessvision |year=2019 |Author=Saurabh B |in=Bakken & Bæck Blog
}}
Robust Computer Vision Chess Analysis and Interaction with a Humanoid Robot
Chessboard and chess piece recognition with the support of neural networks
{{#scite:Czyzewski 2018 |type=article |in=Computer Vision and Image Understanding |title=Chessboard and chess piece recognition with the support of neural networks |arxiv=1708.03898v2 |authors=Maciej A. Czyzewski, Artur Laskowski, Szymon Wasik |year=2018 |pages=11 }}
Chess Position Recognition from a Photo
{{#scite:Oremus 2018 |type=article |in=Master Thesis, Masarykova Univerzita, Fakulta Informatiky, Spring 2018 |title=Chess Position Recognition from a Photo |url=https://is.muni.cz/th/meean/Master_Thesis_twaip.pdf |authors=Zoltán Orémuš |year=2018 |pages=68 }}
Restricted Set Classification with prior probabilities: A case study on chessboard recognition
{{#scite:Kuncheva 2018
|type=article
|in=Pattern Recognition Letters 111 (2018) pp 36–42
|title=Restricted Set Classification with prior probabilities: A case study on chessboard recognition
|url=https://lucykuncheva.co.uk/papers/lkjcprl18.pdf
|doi=10.1016/j.patrec.2018.04.018
|authors=Ludmila I. Kuncheva, James H.V. Constance
|year=2018
|pages=7
}}
DE3-ROB1 CHESS Group Documentation
Bernbaum 2018-03 https://github.com/nebbles/DE3-ROB1-CHESS {{#scite:Bernbaum 2018-03
|type=article |url=https://de3-rob1-chess.readthedocs.io/en/latest/ |authors=Anna Bernbaum, Benedict Greenberg, Josephine Latreille, Sanish Mistry, Leah Pattison, Paolo Ruegg, Sylvia Zhang |year=2018 |title=DE3-ROB1 CHESS Group Documentation |in=CHESS Project for the Robotics 1 module in Design Engineering, Imperial College London, in March 2018.
}}
Chess Piece Recognition Using Oriented Chamfer Matching with a Comparison to CNN
CV Chess
A New Chessboard Corner Detection Algorithm with Simple Thresholding
Stonewall Chess Computer Vision
{{#scite:Donald 2017
|type=article |url=http://notsamdonald.com/stonewall |year=2017 |Author=Sam Donald |in=COSC428 University of Canterbury, NZ 2017
}}
Chess recognition from a single depth image
{{#scite:Wei 2017-07
|type=article |url=https://ieeexplore.ieee.org/document/8019453 |authors=Yu-An Wei, Tzu-Wei Huang, Hwann-Tzong Chen, JenChi Liu |year=2017 |title=Chess recognition from a single depth image |in=2017 IEEE International Conference on Multimedia and Expo (ICME) |pages=6
}}
Chess Recognition Using Computer Vision
{{#scite:Varun 2017-05
|type=article |title=Chess Recognition Using Computer Vision |in=College of Engineering & Computer Science, The Australian National University, Canberra, Australia 2017 |url=https://github.com/SukritGupta17/Chess-Board-Recognition/blob/master/chess_recognition_project_report.pdf |year=2017 |authors=Ramani Varun, Sukrit Gupta |pages=7
}}
Geometry-Based Populated Chessboard Recognition
A Computer Vision System for Chess Game Tracking
{{#scite:Koray 2016
|type=article |url=https://vision.fe.uni-lj.si/cvww2016/proceedings/papers/21.pdf |authors=Can Kory, Emre Sümer |year=2016 |title=A Computer Vision System for Chess Game Tracking |in=21stComputer Vision Winter WorkshopLukaˇCehovin, Rok Mandeljc, VitomirˇStruc (eds.)Rimske Toplice, Slovenia, February 3–5, 2016
}}
ChessVision: Chess Board and Piece Recognition
Ding 2016 https://github.com/jialinding/ChessVision
{{#scite:Ding 2016
|type=article |url=https://web.stanford.edu/class/cs231a/prev_projects_2016/CS_231A_Final_Report.pdf |authors=Jialin Ding |year=2016 |title=ChessVision: Chess Board and Piece Recognition |in=Standford University CS 231a 2016 Final Report
}}
Play Chess With a Webcam
Dugas 2015 {{#scite:Dugas 2015 |type=article |title=Play Chess With a Webcam |authors=Olivier Dugas, Yannick Hold |in= Void's Vault - Knowledge source for efficiency. |year=2015 |url=http://blogdugas.net/blog/2015/05/18/play-chess-with-a-webcam/ }}
Automatic Chess Playing with a Robot Manipulator
{{#scite:Angelkov 2015 |type=article |title=Automatic Chess Playing with a Robot Manipulator |authors=Dimitrija Angelkov,Natasa Koceska,Saso Koceski |in=International Journal of Engineering Issues Vol. 2015, no. 2, pp. 45 -51 |year=2015 |pages=7 |url=https://core.ac.uk/download/pdf/35343045.pdf }}
Magnus the Chess Robot
{{#scite:Unger 2014-07
|type=article |title=Magnus the Chess Robot |authors=Tobias Helstad Unger |year=2014 |url=https://pdfs.semanticscholar.org/1da7/c5c137d5822d4eba5a93b0e2d8d497b822bd.pdf |in=Norwegian University of Science and Technology, Department of Engineering Cybernetics, Master Thesis 2014-07 | pages=111 | retrieved=2019-11-11
}}
CVChess: Computer Vision Chess Analytics
{{#scite:Hack 2014
|type=article |title=CVChess: Computer Vision Chess Analytics |authors=Jay Hack, Prithvi Ramakrishnan |year=2014 |url=http://cvgl.stanford.edu/teaching/cs231a_winter1415/prev/projects/chess.pdf |in=in=Standford University CS 231a Winter 2014/2015 Final Report
}}
Chess State Detection
Bhavani 2014 see also https://web.stanford.edu/class/ee368/Project_Spring_1415/index.html
{{#scite:Bhavani 2014
|type=article |title=Chess State Detection |authors=Bhavani B S |year=2014 |url=https://web.stanford.edu/class/ee368/Project_Spring_1415/Reports/Bhavani.pdf |in=Standford University ee368/cs232 Digital Image Processing Spring 2014/2015
}}
Zip file of code (321 Lines of MatLab)
Visual Chess Recognition
{{#scite:Danner 2014
|type=article |title=Visual Chess Recognition |authors=Cheryl Danner, Mai Kafafy |year=2014 |url=http://web.stanford.edu/class/ee368/Project_Spring_1415/Reports/Danner_Kafafy.pdf |in=Standford University ee368/cs232 Digital Image Processing Spring 2014/2015
}}
Chess move tracking using overhead RGB webcam
Fulltext requested via researchgate.net 2019-11-11
{{#scite:Wang2013 |type=article |title=Chess move tracking using overhead RGB webcam |authors=Victor Wang, Richard Green |in=2013 28th International Conference of Image and Vision Computing New Zealand (IVCNZ) |years=2013 |doi=10.1109/IVCNZ.2013.6727033 |url=https://www.researchgate.net/publication/269127912_Chess_move_tracking_using_overhead_RGB_webcam }}
Chessboard and Pieces Detection for Janggi Chess Playing Robot
{{#scite:Nhat 2013
|type=article |title=Chessboard and Pieces Detection for Janggi Chess Playing Robot |authors=Vo Quang Nhat, GueeSang Lee |year=2013 |doi=10.5392/IJoC.2013.9.4.016 |in=Korea Science 2013
}}
Autonomous Chess-Playing
{{#scite:Will 2013
|type=article |title=Autonomous Chess-Playing |authors=Karsten Will |year=2013 |url=https://www.ias.informatik.tu-darmstadt.de/uploads/Teaching/AutonomousLearningSystems/Will_ALS_2013.pdf |in=Department of Computer Science, Autonomous Learning Systems, TU Darmstadt 2013
}}
Human-Robot Chess
{{#scite:Kapoor 2013
|type=article |title=Human-Robot Chess |authors=Daksh Kapoor, Mayank Gureja, Evan Dissanayake, Anson Jacob |year=2012 |url=https://robotchess.wordpress.com |in=Drexel University Senior Design 2012-13
}}
Chessboard recognition system using signature, principal component analysis and color information
A Simple Autonomous Chess Playing Robot for playing Chess against any opponent in Real Time
Computer vision system for the chess game reconstruction
Fulltext requested via Researchgate on 2019-11-12
{{#scite:Piskorec 2011
|type=article |authors=M. Piškorec, N. Antulov-Fantulin,J. Ćurić,O. Dragoljević,V. Ivanac,L. Karlović |year=2011 |url=https://www.researchgate.net/publication/221412941_Computer_vision_system_for_the_chess_game_reconstruction |title=Computer vision system for the chess game reconstruction |in=2011 Proceedings of the 34th International Convention MIPRO
}}
Gambit: An autonomous chess-playing robotic system
Using Image Processing Techniques to Automate Chess Game Recording
Probabilistic Location of a Populated Chessboard Using Computer Vision
{{#scite:Neufeld 2010
|type=article |doi=10.1109/MWSCAS.2010.5548901 |authors=Jason E. Neufeld and Tyson S. Hall |year=2010 |title=Probabilistic Location of a Populated Chessboard Using Computer Vision |in=53rd IEEE International Midwest Symposium on Circuits and Systems
}}
Automatic Grid Segmentation of Populated Chessboard Taken at a Lower Angle View
Fulltext requested via David C Levy 2019-11-11
{{#scite:Tam 2008-01
|type=article |doi=10.1109/DICTA.2008.40 |authors=K. Y. Tam, Jose A. Lay, David C Levy |year=2008 |title=Automatic Grid Segmentation of Populated Chessboard Taken at a Lower Angle View |in=Proceedings of the International Conference on Digital Image Computing: Techniques and Applications, DICTA 2008, Canberra, ACT, Australia, 1-3 December 2008
}}
Simple Computer Vision System for Chess Playing Robot Manipulator as a Project-based Learning Example
{{#scite:Sokic 2008
|type=article |title=Simple Computer Vision System for Chess Playing Robot Manipulator as aProject-based Learning Example |authors=Emir Sokic, Melita Ahic-Djokic |in=Signal Processing and Information Technology, 2008. ISSPIT 2008. Signal Processingand Information Technology (ISSPIT), Sarajevo, Bosnia and Herzegovina, 16–19 December 2008; pp. 75–79. |doi=10.1109/ISSPIT.2008.4775676 |url=http://people.etf.unsa.ba/~esokic/mypapers/2008ISSPIT.pdf |year=2008 |pages=5
}}
Chess Vision - Real-time tracking of board configuration and chess moves
{{#scite:Huiyan 2007
|type=article |title=Chess Vision - Real-time tracking of board configuration and chess moves |authors=Chua Huiyan, Le Vinh, Wong Lai Kuan |in=CS4243 Computer Vision & Pattern Recognition, National University of Signapore, 2007 |url=https://www.comp.nus.edu.sg/~cs4243/showcase/chess_vision/chess_vision.html |year=2007
}}
Chess Recognition
MarineBlue: A Low-cost Chess Robot
Autonomous Chess-playing Robot
{{#scite:Cour 2002-07
|type=article |title=Autonomous Chess-playing Robot |authors=Timothée Cour, Rémy Lauranson, Matthieu Vachette |in=Ecole Polytechnique |url=https://pdfs.semanticscholar.org/57e7/9b85d53597d59a1009ea964876de260935ea.pdf |year=2002
}}
Chess-playing robot. Lab course in robot sensor integration
References
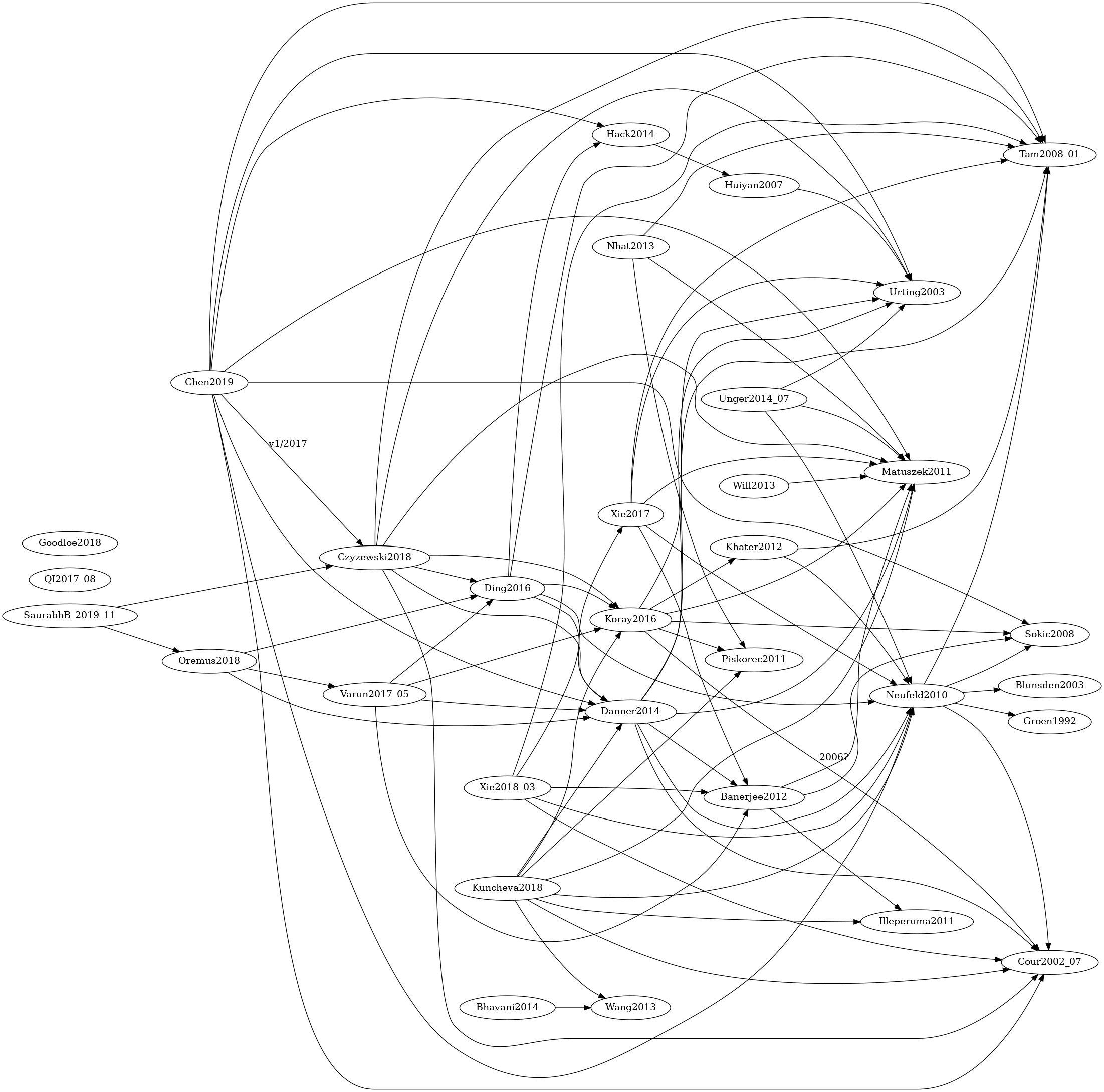
Citation Cross-Reference
The following (incomplete) graph shows some of the cross references between the above papers. Clicking on a node will lead you to the paper's details