PlayChessWithAWebCam: Difference between revisions
No edit summary |
No edit summary |
||
| (58 intermediate revisions by the same user not shown) | |||
| Line 4: | Line 4: | ||
|title=Play Chess With A WebCam | |title=Play Chess With A WebCam | ||
|url=https://github.com/WolfgangFahl/play-chess-with-a-webcam | |url=https://github.com/WolfgangFahl/play-chess-with-a-webcam | ||
|version=0.0. | |version=0.0.2 | ||
|date=2019 | |state=active | ||
|date=2025-03-11 | |||
|since=2019-10-21 | |||
|storemode=property | |storemode=property | ||
}} | }} | ||
[[File:PlayChessWithAWebCam2019-10-26.png|800px|link=https://github.com/WolfgangFahl/play-chess-with-a-webcam]] | [[File:PlayChessWithAWebCam2019-10-26.png|800px|link=https://github.com/WolfgangFahl/play-chess-with-a-webcam]] | ||
{{:PlayChessWithAWebCam/Links}} | |||
= Motivation = | = Motivation = | ||
See {{Link|target=MagneticSensorChessBoard1987}} for the initial project of 1987. | See {{Link|target=MagneticSensorChessBoard1987}} for the initial project of 1987. | ||
Time has moved on and the goals of the 1987 project can be achieved with less hardware and software in a more convenient manner these days. | Time has moved on and the goals of the 1987 project can be achieved with less hardware and software in a more convenient manner these days. | ||
== Usecases == | |||
=== [https://github.com/WolfgangFahl/play-chess-with-a-webcam/issues/26 Play Chess With A Webcam] === | |||
As a chess player | |||
given a physical board and a starting position in FEN notation and a webcam observing the board in a proper angle (e.g. from above) | |||
i want to play moves against an opponent that | |||
# might sit directly in front of me | |||
# might sit with a similar setup remotely in front of a physical board | |||
# might play using some other remote means of communication | |||
so that | |||
my moves are recorded and transmitted with the option to | |||
# later analyze | |||
# immediately analyze and if allowed by the oponent take back moves | |||
If the oponent is not at the board I'll have to do his moves manually or later might use some kind of robot to do that for me ... | |||
=== [https://github.com/WolfgangFahl/play-chess-with-a-webcam/issues/19 Detecting Moves by a WebCAM] === | |||
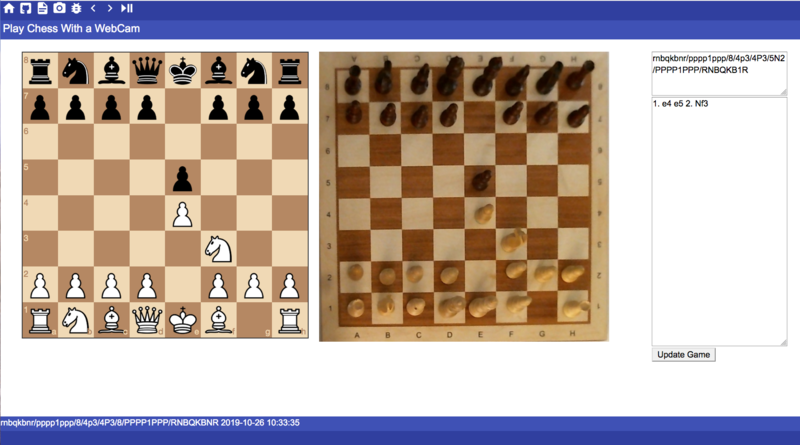
As a chess player given a logical chess board setting in {{Link|target=FEN}} notation (e.g. [https://lichess.org/editor/rnbqkbnr/pppppppp/8/8/8/8/PPPPPPPP/RNBQKBNR_w_KQkq_- starting FEN] that I have setup on my physical board being observed by a webcam in HD at e.g. 25 FPS | |||
I want to use a webcam to detect my next valid move e.g. e2-e4 | |||
so that the logical board changes to the new FEN e.g. (https://lichess.org/editor/rnbqkbnr/pppppppp/8/8/4P3/8/PPPP1PPP/RNBQKBNR_w_KQkq_-) and the | |||
move is available in {{Link|target=Algebraic_Notation}} e.g. e2-e4 e.g. to be transferred via {{Link|target=UCI|title=Universal_Chess_Interface}} or e.g. [https://lichess.org/NqEY44Lg lichess.org] | |||
=== [https://github.com/WolfgangFahl/play-chess-with-a-webcam/issues/22 Process Chessgame webcam movie recording to create PGN] === | |||
As a chess player | |||
I want to process a given movie of a chessgame | |||
so that I get a {{Link|target=PGN|title=Portable Game Notation}} of the game's moves | |||
see | |||
https://chess.stackexchange.com/questions/4695/tools-for-automated-notation-webcam-movie-to-pgn/4699 | |||
= State of Project = | = State of Project = | ||
As of 2019- | As of 2019-12-28 version 0.0.1 has not been released yet. The state of the project is alpha and will be in beta in a few days. | ||
There is already a lof of stuff to try out and to participate in this open source project. | There is already a lof of stuff to try out and to participate in this open source project. | ||
There is a web frontend which you can try out | There is a web frontend which you can try out. Sample videos are available at | ||
https://github.com/SteinscheisserKarl/Chess-Testmedia/ which you can check out with: | |||
<source lang='bash' highlight="1-5"> | |||
sudo apt-get install git-lfs | |||
git clone https://github.com/SteinscheisserKarl/Chess-Testmedia/ | |||
cd Chess-Testmedia | |||
git lfs install | |||
git lfs pull | |||
</source> | |||
<source lang='bash'> | <source lang='bash'> | ||
scripts/ | git clone https://github.com/WolfgangFahl/play-chess-with-a-webcam | ||
cd play-chess-with-a-webcam | |||
scripts/install | |||
scripts/run --input ../Chess-Testmedia/TK_scholarsmate30.avi --event 'PlayChessWithaWebCam' --site 'Stuttgart-Germany' --black OTB1 --white OTB2 --round 1 --warp '[[81,18],[271,15],[268,203],[85,203]]' --rotation 90 --nomoves | |||
</source> | </source> | ||
to tryout one of the Scholars Mate example video's in command line mode | |||
[[File:ScholarsMateDebug2019-10-29.png|400px]] | |||
or | or | ||
<source lang='bash'> | <source lang='bash'> | ||
| Line 30: | Line 77: | ||
scripts/runweb --input 1 | scripts/runweb --input 1 | ||
</source> | </source> | ||
if there is a second | if there is a second webcam installed. | ||
You | You might want to click the corners of your chessboard to try out the warp function manually or click the . | ||
| Line 42: | Line 89: | ||
If you'd like to experiment a bit you can run the tests which will show some debug output. | If you'd like to experiment a bit you can run the tests which will show some debug output. | ||
= Installation = | = Installation = | ||
| Line 103: | Line 125: | ||
After this operation, 81,7 MB of additional disk space will be used. | After this operation, 81,7 MB of additional disk space will be used. | ||
Do you want to continue? [Y/n] y | Do you want to continue? [Y/n] y | ||
</source> | |||
== MacoS Macports == | |||
You might want to set python3 | |||
<source lang='bash'> | |||
sudo port select --list pip | |||
sudo port select --set pip3 pip37 | |||
sudo port select --list python | |||
sudo port select --set python3 python37 | |||
</source> | </source> | ||
= Usage = | = Usage = | ||
== WebUI == | |||
=== Menu === | |||
<html><link href="https://fonts.googleapis.com/icon?family=Material+Icons" rel="stylesheet"></html> | |||
{{MdiIcon|icon=home|color=blue|size=36}} | |||
{{MdiIcon|icon=description|color=blue|size=36|title=Play Chess With A WebCam Wiki Page}} | |||
{{MdiIcon|icon=save|color=blue|size=36}} | |||
{{MdiIcon|icon=folder|color=blue|size=36|title=Show games folder}} | |||
{{MdiIcon|icon=videocam|color=blue|size=36|title=record video}} | |||
{{MdiIcon|icon=camera_alt|color=blue|size=36|title=take still picture}} | |||
{{MdiIcon|icon=bug_report|color=blue|size=36|title=toggle debug mode}} | |||
{{MdiIcon|icon=crop|color=blue|size=36|title=auto find chess board}} | |||
{{MdiIcon|icon=keyboard_arrow_left|color=blue|size=36|title=take back move}} | |||
{{MdiIcon|icon=keyboard_arrow_right|color=blue|size=36|title=forward a move}} | |||
{{MdiIcon|icon=rotate_right|color=blue|size=36|title=rotate the video by 90 degrees}} | |||
{{MdiIcon|icon=play_arrow|color=blue|size=36|title=play/pause video}} | |||
== Command line usage == | == Command line usage == | ||
<source lang='bash' highlight="1"> | <source lang='bash' highlight="1"> | ||
scripts/runweb -h | scripts/runweb -h | ||
[2019-10-27 | [2019-10-29 09:27:14,631] INFO in webchesscam: python src folder is /Users/wf/source/python/play-chess-with-a-webcam/src | ||
[2019-10-27 | [2019-10-29 09:27:14,646] INFO in webchesscam: Running on Darwin | ||
usage: webchesscam.py [-h] [--port PORT] [--input INPUT] [--host HOST] | usage: webchesscam.py [-h] [--port PORT] [--input INPUT] [--host HOST] | ||
[--debug] | [--debug] [--rotation ROTATION] [--warp WARP] | ||
WebChessCam | WebChessCam | ||
optional arguments: | optional arguments: | ||
-h, --help | -h, --help show this help message and exit | ||
--port PORT | --port PORT port to run server at | ||
--input INPUT | --input INPUT Manually set the input device. | ||
--host HOST | --host HOST host to allow access for | ||
--debug | --debug show debug output | ||
--rotation ROTATION rotation of chessboard | |||
--warp WARP warp points | |||
</source> | </source> | ||
= Recording = | == Recording == | ||
== Still images == | === Still images === | ||
<source lang='bash'> | <source lang='bash'> | ||
scripts/still | scripts/still | ||
</source> | </source> | ||
== Video of match == | === Video of match === | ||
<source lang='bash'> | <source lang='bash'> | ||
scripts/record | scripts/record | ||
</source> | </source> | ||
= Example Sources = | |||
== OpenCV == | |||
Also in the examples/opencv directory you'll find: | |||
* colorcluster.py | |||
* histogramm.py | |||
* hough_lines.py | |||
* ... | |||
=== hough lines === | |||
<source lang='bash'> | |||
python3 examples/opencv/hough_lines.py testMedia/chessBoard002.jpg | |||
</source> | |||
[[File:chessBoard002.jpg|300px]] | |||
[[File:detectedProbabilisticHough2019-10-21.png|300px]] | |||
[[File:detectedHough2019-10-21.png|300px]] | |||
=== histogramm / colorcluster === | |||
[[File:chessBoard006.jpg|400px]] | |||
<source lang='bash'> | |||
python3 examples/opencv/histogramm.py testMedia/chessBoard006.jpg | |||
</source> | |||
[[File:hsvhistogramm2019-10-21.jpg|400px]] | |||
<source lang='bash' highlight="1"> | |||
python3 examples/opencv/colorcluster.py testMedia/chessBoard006.jpg | |||
Clusterization took 2.8 s for 1 channels | |||
Clusterization took 4.5 s for 2 channels | |||
Clusterization took 6.7 s for 3 channels | |||
</source> | |||
[[File:colorCluster2019-10-21.jpg|800px]] | |||
= Testing = | = Testing = | ||
<source lang='bash' hightlight="1"> | <source lang='bash' hightlight="1"> | ||
scripts/test | |||
---------- coverage: platform darwin, python 3.7.4-final-0 ----------- | ---------- coverage: platform darwin, python 3.7.4-final-0 ----------- | ||
Name Stmts Miss Cover | Name Stmts Miss Cover | ||
------------------------------------------------ | ------------------------------------------------ | ||
src/Args.py 10 | src/Args.py 10 7 30% | ||
src/Board.py | src/Board.py 79 5 94% | ||
src/BoardDetector.py | src/BoardDetector.py 53 1 98% | ||
src/BoardFinder.py | src/BoardFinder.py 185 12 94% | ||
src/Cell.py 10 3 70% | src/Cell.py 10 3 70% | ||
src/ChessCam.py 85 59 31% | src/ChessCam.py 85 59 31% | ||
src/Environment.py 19 0 100% | |||
src/FPSCheck.py 17 0 100% | src/FPSCheck.py 17 0 100% | ||
src/Field.py | src/Field.py 98 1 99% | ||
src/ | src/Game.py 80 11 86% | ||
src/InputManager.py | src/Histogram.py 72 0 100% | ||
src/JsonAbleMixin.py | src/InputManager.py 41 29 29% | ||
src/JsonAbleMixin.py 32 7 78% | |||
src/MovementDetector.py 55 40 27% | src/MovementDetector.py 55 40 27% | ||
src/RunningStats.py | src/RunningStats.py 61 4 93% | ||
src/StateDetector.py | src/StateDetector.py 102 7 93% | ||
src/Video.py | src/Video.py 275 101 63% | ||
src/WebApp.py | src/WebApp.py 175 84 52% | ||
src/YamlAbleMixin.py 22 4 82% | src/YamlAbleMixin.py 22 4 82% | ||
src/ciede2000.py 88 9 90% | |||
src/imutils/__init__.py 1 0 100% | src/imutils/__init__.py 1 0 100% | ||
src/imutils/perspective.py 25 0 100% | src/imutils/perspective.py 25 0 100% | ||
src/mathUtils.py 48 7 85% | src/mathUtils.py 48 7 85% | ||
src/test_Board.py | src/test_Args.py 16 0 100% | ||
src/test_BoardDetector.py | src/test_Board.py 99 8 92% | ||
src/test_BoardDetector.py 87 0 100% | |||
src/test_ChessCam.py 4 0 100% | src/test_ChessCam.py 4 0 100% | ||
src/test_Field.py | src/test_Field.py 19 0 100% | ||
src/test_Game.py 48 0 100% | |||
src/test_Histogram.py 31 1 97% | |||
src/test_OpenCV_version.py 6 0 100% | src/test_OpenCV_version.py 6 0 100% | ||
src/test_RunningStats.py 35 0 100% | src/test_RunningStats.py 35 0 100% | ||
src/test_StateDetector.py | src/test_StateDetector.py 14 0 100% | ||
src/test_Video.py | src/test_Video.py 68 1 99% | ||
src/test_Warp.py | src/test_Warp.py 46 2 96% | ||
src/test_findBoard.py | src/test_findBoard.py 44 0 100% | ||
src/webchesscam.py 94 39 59% | |||
------------------------------------------------ | ------------------------------------------------ | ||
TOTAL | TOTAL 2244 442 80% | ||
================== | ================== 38 passed, 4 warnings in 94.81s (0:01:34) | ||
</source> | </source> | ||
| Line 188: | Line 275: | ||
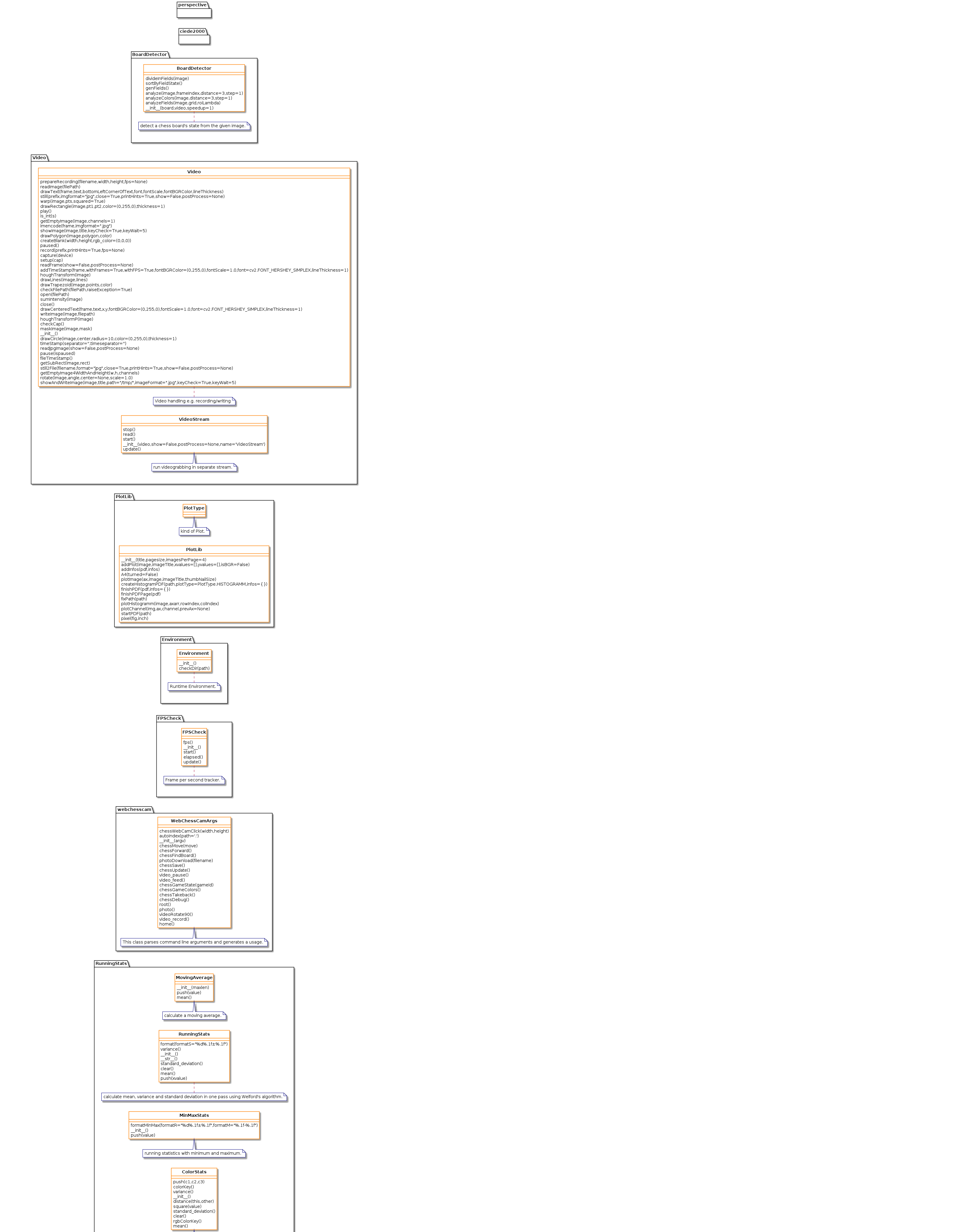
=== Code Structure === | === Code Structure === | ||
click classes to see source code at [https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc Play Chess With A WebCam github repository] | |||
<uml> | <uml> | ||
hide circle | hide circle | ||
left to right direction | left to right direction | ||
package Field { | |||
note top of SquareKind: kind of Square. | |||
class SquareKind [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/Field.py]] { | |||
title(titles=["whitefield","blackfield","whitepiece","blackpiece"]) | |||
} | |||
note top of | class Channel [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/Field.py]] { | ||
class | title(titles=["green","blue","red"]) | ||
__init__( | } | ||
play() | |||
note top of FieldState: the state of a field is a combination of the field color with a piece color + two empty field color options. | |||
class FieldState [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/Field.py]] { | |||
title(titles=["whiteempty","whiteonwhite","blackonwhite","blackempty","whiteonblack","blackonblack"]) | |||
} | |||
note top of Grid: Grid Info in the region of interest. | |||
class Grid [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/Field.py]] { | |||
xstep(pXStep) | |||
split(pStep,parts) | |||
__init__(rois,xsteps,ysteps,safetyX=0,safetyY=0) | |||
safeShift(value,safetyMargin) | |||
dofs(roiIndex) | |||
d() | |||
shiftSafety(rx,ry) | |||
ystep(pYStep) | |||
} | |||
note top of FieldROI: a region of interest within the square image area of pixels represented by some pixels. | |||
class FieldROI [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/Field.py]] { | |||
__init__(field,grid,roiIndex,relPixelLambda) | |||
pixelList() | |||
analyze(image) | |||
interPolate(rx,ry) | |||
} | } | ||
note top of Field: a single Field of a | note top of Field: a single Field of a chess board as observed from a WebCam. | ||
class Field [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class Field [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/Field.py]] { | ||
getColor() | |||
analyzeColor(image,hsv,distance=1,step=1) | |||
hsv255_to_rgb255(h,s,v) | hsv255_to_rgb255(h,s,v) | ||
__init__(row,col) | getFieldState() | ||
__init__(board,row,col) | |||
getRect() | |||
drawDebug(video,image,detectedFieldState) | |||
hsv_to_rgb(h,s,v) | hsv_to_rgb(h,s,v) | ||
getPiece() | |||
divideInROIs(grid,roiLambda) | |||
} | |||
} | |||
package detectstate { | |||
class DetectState [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/detectstate.py]] { | |||
invalidEnd() | |||
validEnd() | |||
check(validChanges,diffSum,diffSumDelta,meanFrameCount) | |||
nextFrame() | |||
__init__(validDiffSumTreshold,invalidDiffSumTreshold,diffSumDeltaTreshold,onPieceMoveDetected=None,onMoveDetected=None) | |||
} | } | ||
note top of | note top of DetectColorState: detect state from Color Distribution. | ||
class | class DetectColorState [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/detectstate.py]] { | ||
__init__( | __init__(trapez) | ||
squareState(fieldColorStats,tSquare,percent) | |||
check(image,averageColors,drawDebug=False) | |||
drawDebug() | |||
inRange(stats,fs,percent) | |||
} | } | ||
class RejectedMove [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | } | ||
package ciede2000 { | |||
} | |||
package Board { | |||
class RejectedMove [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/Board.py]] { | |||
__init__(value) | __init__(value) | ||
__str__() | __str__() | ||
| Line 224: | Line 365: | ||
note top of Board: This class is used to hold the state of a chessboard with pieces positions and the current player's color which player needs to play. It uses the python-chess library by default | note top of Board: This class is used to hold the state of a chessboard with pieces positions and the current player's color which player needs to play. It uses the python-chess library by default | ||
class Board [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class Board [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/Board.py]] { | ||
fen() | fen() | ||
setFEN(fen) | |||
piecesOfColor(color) | |||
setPgn(pgn) | setPgn(pgn) | ||
takeback() | |||
GetCellName(col,row) | GetCellName(col,row) | ||
fieldStateCounts() | |||
__init__(dominatorOffset=(0,-1)) | __init__(dominatorOffset=(0,-1)) | ||
performMove(move) | performMove(move) | ||
getPgn() | |||
fieldAt(row,col) | |||
unicode() | unicode() | ||
move(ucimove) | |||
} | |||
} | |||
package histogram { | |||
note top of Stats: Calculate Histogram statistics see https://math.stackexchange.com/questions/857566/how-to-get-the-standard-deviation-of-a-given-histogram-image | |||
class Stats [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/histogram.py]] { | |||
__init__(histindexed) | |||
range(relFactor=1.0,minValue=0,maxValue=255) | |||
} | |||
note top of Histogram: Image Histogram. | |||
class Histogram [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/histogram.py]] { | |||
savefig(fig,filepath) | |||
colorRangeWithFactor(rangeFactor) | |||
plot() | |||
save(filepath) | |||
plotRow(ax1,ax2) | |||
fix(value) | |||
preparePlot(rows,cols,title='colorhistogram',fontsize=20) | |||
__init__(image,histSize=256,histRange=(0,256)) | |||
showDebug() | |||
colorMask(image,rangeFactor) | |||
range(relFactor=1.0) | |||
show() | |||
} | |||
} | |||
package game { | |||
note top of Game: keeps track of a games state in a JavaScript compatible way to exchange game State information. | |||
class Game [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/game.py]] { | |||
showDebug() | |||
__init__(gameid) | |||
} | } | ||
class | |||
note top of WebCamGame: keeps track of a webcam games state in a JavaScript compatible way to exchange game and webcam/board State information. | |||
class WebCamGame [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/game.py]] { | |||
checkEnvironment(env) | |||
getWebCamGames(path) | |||
save(path="games") | |||
__init__(gameid) | |||
} | } | ||
note top of Warp: holds the trapezoid points to be use for warping an image take from a peculiar angle. | note top of Warp: holds the trapezoid points to be use for warping an image take from a peculiar angle. | ||
class Warp [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class Warp [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/game.py]] { | ||
updatePoints() | |||
rotate(angle) | rotate(angle) | ||
addPoint(px,py) | addPoint(px,py) | ||
__init__(rotation=0,bgrColor=(0,255,0)) | __init__(pointList=[],rotation=0,bgrColor=(0,255,0)) | ||
} | |||
} | |||
package Environment4Test { | |||
note top of Environment4Test: Test Environment. | |||
class Environment4Test [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/Environment4Test.py]] { | |||
loadFromImageInfo(webApp,imageInfo) | |||
__init__() | |||
getImage(num) | |||
prepareFromImageInfo(imageInfo) | |||
getImageWithVideo(num) | |||
} | } | ||
} | |||
package WebApp { | |||
note top of WebApp: actual Play Chess with a WebCam Application - Flask calls are routed here. | note top of WebApp: actual Play Chess with a WebCam Application - Flask calls are routed here. | ||
class WebApp [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class WebApp [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/WebApp.py]] { | ||
photo(path) | photo(path) | ||
chessFEN(fen) | |||
genVideo(video) | genVideo(video) | ||
__init__(args,logger=None) | |||
chessMove(move) | |||
chessForward() | chessForward() | ||
chessFindBoard() | |||
log(msg) | |||
videoFeed() | videoFeed() | ||
videoPause() | videoPause() | ||
videoRecord(path) | |||
chessWebCamClick(x,y,w,h) | chessWebCamClick(x,y,w,h) | ||
chessPgn(pgn) | |||
chessSave() | |||
index(msg) | index(msg) | ||
#genVideoStreamed(video) | |||
indexException(e) | |||
chessGameState(gameid) | |||
timeStamp() | |||
chessGameColors() | |||
setDebug(debug) | |||
createNewCame() | |||
photoDownload(path,filename) | |||
warpAndRotate(image) | warpAndRotate(image) | ||
chessTakeback() | chessTakeback() | ||
| Line 269: | Line 481: | ||
} | } | ||
} | |||
package YamlAbleMixin { | |||
note top of YamlAbleMixin: allow reading and writing derived objects from a yaml file. | note top of YamlAbleMixin: allow reading and writing derived objects from a yaml file. | ||
class YamlAbleMixin [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class YamlAbleMixin [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/YamlAbleMixin.py]] { | ||
writeYaml(name) | writeYaml(name) | ||
readYaml(name) | readYaml(name) | ||
} | } | ||
class | } | ||
package ChessTrapezoid { | |||
Trapez2Square <|-- ChessTrapezoid | |||
ChessTrapezoid -- ChessTSquare | |||
ChessTSquare -- SquareChange | |||
ChessTSquare -- FieldState | |||
note top of Transformation: Transformation kind. | |||
class Transformation [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/ChessTrapezoid.py]] { | |||
} | } | ||
class | note top of Trapez2Square: transform a trapez to a square and back as needed. | ||
class Trapez2Square [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/ChessTrapezoid.py]] { | |||
relativeTrapezToTrapezXY(rx1,ry1,rx2,ry2) | |||
__init__( | __init__(topLeft,topRight,bottomRight,bottomLeft) | ||
relativeToTrapezXY(rx,ry) | |||
} | } | ||
class | |||
__init__(value) | note top of ChessTrapezoid: Chess board Trapezoid (UK) / Trapezium (US) / Trapez (DE) as seen via a webcam image. | ||
class ChessTrapezoid [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/ChessTrapezoid.py]] { | |||
tSquareAt(row,col,rotation=0) | |||
analyzeColors(image) | |||
checkColors(image,averageColors,rangeFactor=1.0) | |||
relativeToIdealXY(rx,ry) | |||
__init__(trapezPoints,idealSize=640,rotation=0,video=None) | |||
preMoveBoard(w,h) | |||
setup(idealSize=640,video=None) | |||
detectChanges(image,diffImage,detectState) | |||
diffSum(image,other) | |||
updatePieces(fen) | |||
drawRCenteredText(image,text,rx,ry,color=(255,255,255)) | |||
warpedBoardImage(image) | |||
drawDebug(image,color=(255,255,255)) | |||
optimizeColorCheck(image,averageColors,debug=False) | |||
genSquares() | |||
idealColoredBoard(w,h,transformation=Transformation.IDEAL) | |||
rotateIndices(row,col,rotation) | |||
diffBoardImage(image,other) | |||
byFieldState() | |||
drawFieldStates(image,fieldStates,transformation=Transformation.ORIGINAL,channels=3) | |||
drawRCircle(image,rcenter,rradius,color,thickness=-1) | |||
drawCircle(image,center,radius,color,thickness=-1) | |||
} | |||
note top of FieldState: the state of a field is a combination of the field color with a piece color + two empty field color options. | |||
class FieldState [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/ChessTrapezoid.py]] { | |||
title(titles=["whiteempty","whiteonwhite","blackonwhite","blackempty","whiteonblack","blackonblack"]) | |||
} | |||
note top of FieldColorStats: Color statistics for Fields. | |||
class FieldColorStats [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/ChessTrapezoid.py]] { | |||
showStatsDebug(time) | |||
analyzeStats(factor,time,debug=False) | |||
__init__() | |||
push(fieldState,an,percent) | |||
showFieldStateDebug(fieldState) | |||
showDebug(time) | |||
} | |||
note top of Color: Color definitions with maximum lightness difference and calculation of average color for a sample of square with a given fieldState. | |||
class Color [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/ChessTrapezoid.py]] { | |||
colorRange(rangeFactor) | |||
fixMeans(means,stds,pixels,nonzero) | |||
__init__(image) | |||
fix(value) | |||
__str__() | __str__() | ||
countNonZero(image) | |||
} | |||
note top of SquareChange: keep track of changes of a square over time. | |||
class SquareChange [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/ChessTrapezoid.py]] { | |||
push(stats,value) | |||
__init__(value,stats) | |||
} | } | ||
note top of | note top of ChessTSquare: a chess square in it's trapezoidal perspective. | ||
class | class ChessTSquare [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/ChessTrapezoid.py]] { | ||
checkMoved(detectState) | |||
squareChange(image,diffImage) | |||
getFieldState() | |||
rxy2xy(image) | |||
drawState(image,transformation,channels) | |||
setPolygons(trapez,rtl_x,rtl_y,rtr_x,rtr_y,rbr_x,rbr_y,rbl_x,rbl_y) | |||
getSquareImage(image) | |||
addPreMoveImage(image) | |||
getPolygon(transformation) | |||
drawDebug(image,color=(255,255,255)) | |||
rcenter() | |||
__init__(trapez,square) | |||
} | } | ||
class | } | ||
package boardfinder { | |||
BoardFinder -- Corners | |||
note top of Corners: Chess board corners. | |||
class Corners [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/boardfinder.py]] { | |||
sortXY(xy) | |||
trapezColRows(cols,rows) | |||
showDebug(image,title) | |||
sort() | |||
asPolygons(safetyMargin) | |||
writeDebug(image,title,prefix) | |||
showTrapezDebug(image,title,corners) | |||
findPattern(image) | |||
calcTrapez() | |||
genChessPatterns() | |||
calcPolygons(*safetyMargins) | |||
safeXY(x,y,dx,dy) | |||
__init__(pattern,video) | |||
} | } | ||
note top of | note top of BoardFinder: find a chess board in the given image. | ||
class | class BoardFinder [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/boardfinder.py]] { | ||
drawPolygon(image,pos,polygon,whiteColor,blackColor) | |||
findChessBoard(image,title) | |||
expand(image,title,histograms,corners) | |||
getColorFiltered(image,histograms,title,corners) | |||
maskPolygon(image,polygon) | |||
findCorners(image,limit=1,searchWidth=640) | |||
showHistogramDebug(histograms,title,corners) | |||
sortPoints(xylist) | |||
centerXY(xylist) | |||
showPolygonDebug(image,title,corners) | |||
maskCornerPolygons(image,corners,filterColor) | |||
__init__(image,video=None) | |||
fieldColor(pos) | |||
preparefindCorners(image,searchWidth=640) | |||
getHistograms(image,title,corners) | |||
findOuterCorners(searchWidth=640) | |||
} | } | ||
} | |||
package JsonAbleMixin { | |||
note top of JsonAbleMixin: allow reading and writing derived objects from a json file. | note top of JsonAbleMixin: allow reading and writing derived objects from a json file. | ||
class JsonAbleMixin [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class JsonAbleMixin [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/JsonAbleMixin.py]] { | ||
writeJson(name,postfix=".json") | writeJson(name,postfix=".json") | ||
readJson(name,postfix=".json") | readJson(name,postfix=".json") | ||
asJson() | |||
} | } | ||
} | |||
package RunningStats { | |||
note top of RunningStats: calculate mean, variance and standard deviation in one pass using | note top of MovingAverage: calculate a moving average. | ||
class RunningStats [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class MovingAverage [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/RunningStats.py]] { | ||
__init__(maxlen) | |||
push(value) | |||
mean() | |||
} | |||
class MinMaxMixin [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/RunningStats.py]] { | |||
pushMinMax(value) | |||
formatMinMax(formatM="%.1f-%.1f") | |||
initMinMax() | |||
__str__() | |||
} | |||
note top of RunningStats: calculate mean, variance and standard deviation in one pass using Welford's algorithm. | |||
class RunningStats [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/RunningStats.py]] { | |||
format(formatS="%d%.1f±%.1f") | |||
variance() | variance() | ||
__init__() | __init__() | ||
__str__() | |||
standard_deviation() | standard_deviation() | ||
clear() | clear() | ||
mean() | mean() | ||
push(xvalue) | push(xvalue) | ||
} | |||
note top of MinMaxStats: running statistics with minimum and maximum. | |||
class MinMaxStats [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/RunningStats.py]] { | |||
formatMinMax(formatR="%d%.1f±%.1f",formatM="%.1f-%.1f") | |||
__init__() | |||
push(value) | |||
} | } | ||
note top of ColorStats: calculate the RunningStats for 3 color channels like RGB or HSV simultaneously. | note top of ColorStats: calculate the RunningStats for 3 color channels like RGB or HSV simultaneously. | ||
class ColorStats [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class ColorStats [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/RunningStats.py]] { | ||
push(c1,c2,c3) | push(c1,c2,c3) | ||
colorKey() | colorKey() | ||
| Line 349: | Line 688: | ||
square(value) | square(value) | ||
standard_deviation() | standard_deviation() | ||
clear() | |||
rgbColorKey() | |||
mean() | mean() | ||
} | } | ||
} | |||
package webchesscam { | |||
note top of WebChessCamArgs: This class parses command line arguments and generates a usage. | note top of WebChessCamArgs: This class parses command line arguments and generates a usage. | ||
class WebChessCamArgs [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class WebChessCamArgs [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/webchesscam.py]] { | ||
chessWebCamClick(width,height) | chessWebCamClick(width,height) | ||
autoindex(path='.') | |||
__init__(argv) | __init__(argv) | ||
chessMove(move) | chessMove(move) | ||
chessForward() | chessForward() | ||
chessFindBoard() | |||
photoDownload(filename) | |||
chessSave() | |||
chessUpdate() | |||
video_pause() | video_pause() | ||
video_feed() | video_feed() | ||
chessGameState(gameid) | |||
chessGameColors() | |||
chessTakeback() | chessTakeback() | ||
chessDebug() | chessDebug() | ||
| Line 368: | Line 716: | ||
photo() | photo() | ||
videoRotate90() | videoRotate90() | ||
video_record() | |||
home() | home() | ||
} | } | ||
} | |||
package FPSCheck { | |||
note top of FPSCheck: Frame per second tracker. | note top of FPSCheck: Frame per second tracker. | ||
class FPSCheck [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class FPSCheck [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/FPSCheck.py]] { | ||
fps() | fps() | ||
__init__() | __init__() | ||
| Line 381: | Line 732: | ||
} | } | ||
} | |||
package Environment { | |||
note top of Environment: Runtime Environment. | |||
class Environment [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/Environment.py]] { | |||
note top of | |||
class | |||
__init__() | __init__() | ||
checkDir(path) | |||
} | } | ||
} | |||
package PlotLib { | |||
note top of | note top of PlotType: kind of Plot. | ||
class | class PlotType [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/PlotLib.py]] { | ||
} | } | ||
class | class PlotLib [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/PlotLib.py]] { | ||
__init__( | __init__(title,pagesize,imagesPerPage=4) | ||
addPlot(image,imageTitle,xvalues=[],yvalues=[],isBGR=False) | |||
addInfos(pdf,infos) | |||
A4(turned=False) | |||
plotImage(ax,image,imageTitle,thumbNailSize) | |||
createHistogramPDF(path,plotType=PlotType.HISTOGRAMM,infos={}) | |||
finishPDF(pdf,infos={}) | |||
finishPDFPage(pdf) | |||
fixPath(path) | |||
plotHistogramm(image,axarr,rowIndex,colIndex) | |||
plotChannel(img,ax,channel,prevAx=None) | |||
startPDF(path) | |||
pixel(fig,inch) | |||
} | } | ||
} | |||
package Video { | |||
note top of Video: Video handling e.g. recording/writing | note top of Video: Video handling e.g. recording/writing | ||
class Video [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class Video [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/Video.py]] { | ||
prepareRecording(filename,width,height,fps=None) | |||
imencode(frame, | readImage(filePath) | ||
drawText(frame,text,bottomLeftCornerOfText,font,fontScale,fontBGRColor,lineThickness) | |||
addTimeStamp(frame,withFrames=True,withFPS=True,fontBGRColor=(0,255,0),fontScale=1. | still(prefix,imgformat="jpg",close=True,printHints=True,show=False,postProcess=None) | ||
warp(image,pts,squared=True) | |||
drawRectangle(image,pt1,pt2,color=(0,255,0),thickness=1) | |||
play() | |||
is_int(s) | |||
getEmptyImage(image,channels=1) | |||
imencode(frame,imgformat=".jpg") | |||
showImage(image,title,keyCheck=True,keyWait=5) | |||
drawPolygon(image,polygon,color) | |||
createBlank(width,height,rgb_color=(0,0,0)) | |||
paused() | |||
record(prefix,printHints=True,fps=None) | |||
capture(device) | |||
setup(cap) | |||
readFrame(show=False,postProcess=None) | |||
addTimeStamp(frame,withFrames=True,withFPS=True,fontBGRColor=(0,255,0),fontScale=1.0,font=cv2.FONT_HERSHEY_SIMPLEX,lineThickness=1) | |||
houghTransform(image) | |||
drawLines(image,lines) | drawLines(image,lines) | ||
drawTrapezoid(image,points,color) | |||
checkFilePath(filePath,raiseException=True) | checkFilePath(filePath,raiseException=True) | ||
open(filePath) | |||
sumIntensity(image) | |||
close() | |||
drawCenteredText(frame,text,x,y,fontBGRColor=(0,255,0),fontScale=1.0,font=cv2.FONT_HERSHEY_SIMPLEX,lineThickness=1) | |||
writeImage(image,filepath) | |||
houghTransformP(image) | |||
checkCap() | |||
maskImage(image,mask) | |||
__init__() | __init__() | ||
drawCircle(image,center,radius=10,color=(0,255,0),thickness=1) | drawCircle(image,center,radius=10,color=(0,255,0),thickness=1) | ||
timeStamp(separator='',timeseparator='') | |||
readJpgImage(show=False,postProcess=None) | readJpgImage(show=False,postProcess=None) | ||
pause(ispaused) | |||
fileTimeStamp() | |||
getSubRect(image,rect) | getSubRect(image,rect) | ||
still2File(filename,format="jpg",close=True,printHints=True,show=False,postProcess=None) | still2File(filename,format="jpg",close=True,printHints=True,show=False,postProcess=None) | ||
getEmptyImage4WidthAndHeight(w,h,channels) | |||
rotate(image,angle,center=None,scale=1.0) | |||
showAndWriteImage(image,title,path="/tmp/",imageFormat=".jpg",keyCheck=True,keyWait=5) | |||
} | } | ||
note top of VideoStream: run videograbbing in separate stream. | note top of VideoStream: run videograbbing in separate stream. | ||
class VideoStream [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class VideoStream [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/Video.py]] { | ||
stop() | stop() | ||
read() | read() | ||
| Line 464: | Line 823: | ||
} | } | ||
} | |||
package BoardDetector { | |||
note top of BoardDetector: detect a chess board's state from the given image. | note top of BoardDetector: detect a chess board's state from the given image. | ||
class BoardDetector [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/ | class BoardDetector [[https://github.com/WolfgangFahl/play-chess-with-a-webcam/tree/master/pcwawc/BoardDetector.py]] { | ||
divideInFields(image) | |||
sortByFieldState() | |||
genFields() | |||
analyze(image,frameIndex,distance=3,step=1) | |||
analyzeColors(image,distance=3,step=1) | |||
analyzeFields(image,grid,roiLambda) | |||
__init__(board,video,speedup=1) | |||
} | } | ||
} | |||
package perspective { | |||
} | |||
skinparam titleFontSize 18 | |||
skinparam titleFontStyle bold | |||
skinparam titleFontName Arial | |||
skinparam classBackgroundColor white | |||
skinparam classBorderColor #FF8000 | |||
skinparam classFontColor black | |||
skinparam classFontSize 14 | |||
skinparam classFontStyle bold | |||
skinparam classFontName Arial | |||
skinparam classAttributeFontName Arial | |||
skinparam classAttributeFontSize 14 | |||
skinparam classArrowFontName Arial | |||
skinparam classArrowFontSize 14 | |||
skinparam noteBackgroundColor #FFFFFF | |||
skinparam noteBorderColor #000080 | |||
skinparam noteFontName Arial | |||
skinparam noteFontSize 14 | |||
</uml> | </uml> | ||
[[Category:Raspberry]] | [[Category:Raspberry]] | ||
[[Category:Chess]] | [[Category:Chess]] | ||
= Development Environment = | |||
https://www.liclipse.com/ is recommended since it alows interactive graphical debugging and editing with syntax and error hints. | |||
= OS-Support = | = OS-Support = | ||
== MacOS High Sierra 10.13.6 == | == MacOS High Sierra 10.13.6 == | ||
| Line 567: | Line 958: | ||
== Ubuntu 18.04.3 LTS bionic beaver == | == Ubuntu 18.04.3 LTS bionic beaver == | ||
=== Upgrade Python to 3.7 === | |||
see https://linuxize.com/post/how-to-install-python-3-7-on-ubuntu-18-04/ | |||
<source lang='bash'> | |||
sudo add-apt-repository ppa:deadsnakes/ppa | |||
sudo apt-install python3.7 | |||
# install tkinter | |||
sudo apt-get install python3-tk | |||
</source> | |||
make python3.7 the default python3 | |||
* https://unix.stackexchange.com/a/410851/38701 | |||
=== Install === | === Install === | ||
<source lang='bash' highlight="1,23"> | <source lang='bash' highlight="1,23"> | ||
scripts/install | scripts/install | ||
scripts/install | |||
Bootstrap already downloaded | |||
Material Design Lite already downloaded | |||
Material Design Icons already downloaded | |||
chessboard.js already downloaded | |||
chessboard-1.0.0.css already downloaded | |||
chessboard-1.0.0.min.css already downloaded | |||
js/jquery-3.4.1.min.js already downloaded | |||
chess.js already downloaded | |||
checking that python3 is installed on os Linux ... | checking that python3 is installed on os Linux ... | ||
/usr/bin/python3 | /usr/bin/python3 | ||
checking that pip3 is installed on os Linux ... | checking that pip3 is installed on os Linux ... | ||
/usr/bin/pip3 | |||
Collecting opencv-python==4.1.2.30 (from -r requirements.txt (line 6)) | |||
Downloading https://files.pythonhosted.org/packages/d8/38/60de02a4c9013b14478a3f681a62e003c7489d207160a4d7df8705a682e7/opencv_python-4.1.2.30-cp37-cp37m-manylinux1_x86_64.whl (28.3MB) | |||
100% |████████████████████████████████| 28.3MB 50kB/s | |||
Collecting python-chess==0.29.0 (from -r requirements.txt (line 9)) | |||
Using cached https://files.pythonhosted.org/packages/63/eb/003a6c069c0208e169165acd2d90665fa3901baab19b5fa26603d86b7193/python_chess-0.29.0-py3-none-any.whl | |||
Collecting berserk==0.3.1 (from -r requirements.txt (line 12)) | |||
Using cached https://files.pythonhosted.org/packages/bb/09/d25b49f70145e07a5ca7aa1a5ff9bf5499ba0754341a592a2e8d165ed621/berserk-0.3.1-py2.py3-none-any.whl | |||
Collecting python-lichess==0.9 (from -r requirements.txt (line 14)) | |||
Using cached https://files.pythonhosted.org/packages/23/07/6cfaa4ef2649d705defc3e7c8ff7ed3a3bb467400325d00ad9da3acedf39/python_lichess-0.9-py3-none-any.whl | |||
Collecting imutils==0.5.3 (from -r requirements.txt (line 16)) | |||
Using cached https://files.pythonhosted.org/packages/b5/94/46dcae8c061e28be31bcaa55c560cb30ee9403c9a4bb2659768ec1b9eb7d/imutils-0.5.3.tar.gz | |||
Collecting Flask==1.1.1 (from -r requirements.txt (line 21)) | |||
Using cached https://files.pythonhosted.org/packages/9b/93/628509b8d5dc749656a9641f4caf13540e2cdec85276964ff8f43bbb1d3b/Flask-1.1.1-py2.py3-none-any.whl | |||
Collecting Flask-RESTful==0.3.7 (from -r requirements.txt (line 22)) | |||
Using cached https://files.pythonhosted.org/packages/17/44/6e490150ee443ca81d5f88b61bb4bbb133d44d75b0b716ebe92489508da4/Flask_RESTful-0.3.7-py2.py3-none-any.whl | |||
Collecting Flask-AutoIndex==0.6.4 (from -r requirements.txt (line 23)) | |||
Using cached https://files.pythonhosted.org/packages/dc/43/26df9c0c0e7d3de98ba7cbe89e7b88c280e40c87073025171d2d702d0b5f/Flask_AutoIndex-0.6.4-py3-none-any.whl | |||
Collecting PyYAML==5.1 (from -r requirements.txt (line 25)) | |||
Using cached https://files.pythonhosted.org/packages/9f/2c/9417b5c774792634834e730932745bc09a7d36754ca00acf1ccd1ac2594d/PyYAML-5.1.tar.gz | |||
Collecting mss==4.0.3 (from -r requirements.txt (line 27)) | |||
Using cached https://files.pythonhosted.org/packages/67/2a/8e26437bcc840e19ca5290897d47f5405e302af27d4a6401e0b0edc39942/mss-4.0.3-py2.py3-none-any.whl | |||
Collecting Pillow==6.2.1 (from -r requirements.txt (line 29)) | |||
Downloading https://files.pythonhosted.org/packages/89/3e/31c2e5385d7588016c6f7ac552e81c3fff2bef4bc61b6f82f8177752405c/Pillow-6.2.1-cp37-cp37m-manylinux1_x86_64.whl (2.1MB) | |||
100% |████████████████████████████████| 2.1MB 678kB/s | |||
Collecting jsonpickle==1.2 (from -r requirements.txt (line 35)) | |||
Using cached https://files.pythonhosted.org/packages/07/07/c157520a3ebd166c8c24c6ae0ecae7c3968eb4653ff0e5af369bb82f004d/jsonpickle-1.2-py2.py3-none-any.whl | |||
Collecting interface==2.11.1 (from -r requirements.txt (line 39)) | |||
Using cached https://files.pythonhosted.org/packages/f9/80/7283dfe76ceb7eb1868cf97b8c8cb3a988f80757921341f95d5420de2a6e/Interface-2.11.1.tar.gz | |||
Collecting pytest==3.8.2 (from -r requirements.txt (line 44)) | |||
( | Using cached https://files.pythonhosted.org/packages/08/e0/a4945a06380802264b3416d788ad607588c334662b6cd0af54144c45912d/pytest-3.8.2-py2.py3-none-any.whl | ||
Collecting matplotlib==2.2.3 (from -r requirements.txt (line 46)) | |||
Downloading https://files.pythonhosted.org/packages/52/46/ff47fea8e5c528c497fc385c95887131c4319a3411814ba9a766b66a9367/matplotlib-2.2.3-cp37-cp37m-manylinux1_x86_64.whl (12.6MB) | |||
100% |████████████████████████████████| 12.6MB 116kB/s | |||
Collecting scipy==1.2.2 (from -r requirements.txt (line 48)) | |||
Downloading https://files.pythonhosted.org/packages/f3/84/2cc37b97e96da0be03d5dcebdd967214cae14b14b0131398b374ea89c50e/scipy-1.2.2-cp37-cp37m-manylinux1_x86_64.whl (24.8MB) | |||
100% |████████████████████████████████| 24.8MB 59kB/s | |||
Collecting pytest-cov==2.8.1 (from -r requirements.txt (line 50)) | |||
Using cached https://files.pythonhosted.org/packages/b9/54/3673ee8be482f81527678ac894276223b9814bb7262e4f730469bb7bf70e/pytest_cov-2.8.1-py2.py3-none-any.whl | |||
Collecting numpy>=1.14.5 (from opencv-python==4.1.2.30->-r requirements.txt (line 6)) | |||
Downloading https://files.pythonhosted.org/packages/20/53/127cb49435bcf5d841baf8eafa030931c62a9eac577a641f8c2293d23371/numpy-1.18.0-cp37-cp37m-manylinux1_x86_64.whl (20.1MB) | |||
100% |████████████████████████████████| 20.1MB 70kB/s | |||
Collecting ndjson==0.1.0 (from berserk==0.3.1->-r requirements.txt (line 12)) | |||
Using cached https://files.pythonhosted.org/packages/39/ba/0628840da7b61fb63a6a0e030291a7a5e5d393a51cbcb27ded8b2a838aa9/ndjson-0.1.0-py2.py3-none-any.whl | |||
Collecting requests>=2.20.0 (from berserk==0.3.1->-r requirements.txt (line 12)) | |||
Using cached https://files.pythonhosted.org/packages/51/bd/23c926cd341ea6b7dd0b2a00aba99ae0f828be89d72b2190f27c11d4b7fb/requests-2.22.0-py2.py3-none-any.whl | |||
Requirement already satisfied: six in /usr/lib/python3/dist-packages (from python-lichess==0.9->-r requirements.txt (line 14)) | |||
Collecting click>=5.1 (from Flask==1.1.1->-r requirements.txt (line 21)) | |||
Using cached https://files.pythonhosted.org/packages/fa/37/45185cb5abbc30d7257104c434fe0b07e5a195a6847506c074527aa599ec/Click-7.0-py2.py3-none-any.whl | |||
Collecting Werkzeug>=0.15 (from Flask==1.1.1->-r requirements.txt (line 21)) | |||
Using cached https://files.pythonhosted.org/packages/ce/42/3aeda98f96e85fd26180534d36570e4d18108d62ae36f87694b476b83d6f/Werkzeug-0.16.0-py2.py3-none-any.whl | |||
Collecting Jinja2>=2.10.1 (from Flask==1.1.1->-r requirements.txt (line 21)) | |||
Using cached https://files.pythonhosted.org/packages/65/e0/eb35e762802015cab1ccee04e8a277b03f1d8e53da3ec3106882ec42558b/Jinja2-2.10.3-py2.py3-none-any.whl | |||
Collecting itsdangerous>=0.24 (from Flask==1.1.1->-r requirements.txt (line 21)) | |||
Using cached https://files.pythonhosted.org/packages/76/ae/44b03b253d6fade317f32c24d100b3b35c2239807046a4c953c7b89fa49e/itsdangerous-1.1.0-py2.py3-none-any.whl | |||
Requirement already satisfied: pytz in /usr/lib/python3/dist-packages (from Flask-RESTful==0.3.7->-r requirements.txt (line 22)) | |||
Collecting aniso8601>=0.82 (from Flask-RESTful==0.3.7->-r requirements.txt (line 22)) | |||
Using cached https://files.pythonhosted.org/packages/eb/e4/787e104b58eadc1a710738d4e418d7e599e4e778e52cb8e5d5ef6ddd5833/aniso8601-8.0.0-py2.py3-none-any.whl | |||
Collecting future>=0.13.0 (from Flask-AutoIndex==0.6.4->-r requirements.txt (line 23)) | |||
Using cached https://files.pythonhosted.org/packages/45/0b/38b06fd9b92dc2b68d58b75f900e97884c45bedd2ff83203d933cf5851c9/future-0.18.2.tar.gz | |||
Collecting Flask-Silk>=0.2 (from Flask-AutoIndex==0.6.4->-r requirements.txt (line 23)) | |||
Using cached https://files.pythonhosted.org/packages/05/95/57667716765b21a8fcd0918ae4a99b5de60f8632d7d1a0b401609fbb28ab/Flask-Silk-0.2.tar.gz | |||
Requirement already satisfied: zope.interface in /usr/lib/python3/dist-packages (from interface==2.11.1->-r requirements.txt (line 39)) | |||
Collecting zope.schema (from interface==2.11.1->-r requirements.txt (line 39)) | |||
Using cached https://files.pythonhosted.org/packages/3c/e6/5454a9d72372b73aec715bbded44a0311807dcf7869e2b7bcf196a8e92de/zope.schema-4.9.3-py2.py3-none-any.whl | |||
Requirement already satisfied: setuptools in /usr/lib/python3/dist-packages (from pytest==3.8.2->-r requirements.txt (line 44)) | |||
Collecting py>=1.5.0 (from pytest==3.8.2->-r requirements.txt (line 44)) | |||
Using cached https://files.pythonhosted.org/packages/76/bc/394ad449851729244a97857ee14d7cba61ddb268dce3db538ba2f2ba1f0f/py-1.8.0-py2.py3-none-any.whl | |||
Collecting atomicwrites>=1.0 (from pytest==3.8.2->-r requirements.txt (line 44)) | |||
Using cached https://files.pythonhosted.org/packages/52/90/6155aa926f43f2b2a22b01be7241be3bfd1ceaf7d0b3267213e8127d41f4/atomicwrites-1.3.0-py2.py3-none-any.whl | |||
Collecting pluggy>=0.7 (from pytest==3.8.2->-r requirements.txt (line 44)) | |||
Using cached https://files.pythonhosted.org/packages/a0/28/85c7aa31b80d150b772fbe4a229487bc6644da9ccb7e427dd8cc60cb8a62/pluggy-0.13.1-py2.py3-none-any.whl | |||
Collecting attrs>=17.4.0 (from pytest==3.8.2->-r requirements.txt (line 44)) | |||
Using cached https://files.pythonhosted.org/packages/a2/db/4313ab3be961f7a763066401fb77f7748373b6094076ae2bda2806988af6/attrs-19.3.0-py2.py3-none-any.whl | |||
Collecting more-itertools>=4.0.0 (from pytest==3.8.2->-r requirements.txt (line 44)) | |||
Using cached https://files.pythonhosted.org/packages/68/03/0604cec1ea13c9f063dd50f900d1a36160334dd3cfb01fd0e638f61b46ba/more_itertools-8.0.2-py3-none-any.whl | |||
Requirement already satisfied: python-dateutil>=2.1 in /usr/lib/python3/dist-packages (from matplotlib==2.2.3->-r requirements.txt (line 46)) | |||
Collecting cycler>=0.10 (from matplotlib==2.2.3->-r requirements.txt (line 46)) | |||
Using cached https://files.pythonhosted.org/packages/f7/d2/e07d3ebb2bd7af696440ce7e754c59dd546ffe1bbe732c8ab68b9c834e61/cycler-0.10.0-py2.py3-none-any.whl | |||
Collecting kiwisolver>=1.0.1 (from matplotlib==2.2.3->-r requirements.txt (line 46)) | |||
Downloading https://files.pythonhosted.org/packages/93/f8/518fb0bb89860eea6ff1b96483fbd9236d5ee991485d0f3eceff1770f654/kiwisolver-1.1.0-cp37-cp37m-manylinux1_x86_64.whl (90kB) | |||
100% |████████████████████████████████| 92kB 5.3MB/s | |||
Collecting pyparsing!=2.0.4,!=2.1.2,!=2.1.6,>=2.0.1 (from matplotlib==2.2.3->-r requirements.txt (line 46)) | |||
Using cached https://files.pythonhosted.org/packages/5d/bc/1e58593167fade7b544bfe9502a26dc860940a79ab306e651e7f13be68c2/pyparsing-2.4.6-py2.py3-none-any.whl | |||
Collecting coverage>=4.4 (from pytest-cov==2.8.1->-r requirements.txt (line 50)) | |||
Downloading https://files.pythonhosted.org/packages/ee/04/3d94488c04c5fa82eb21a04c82b3f4f1a54fc230496aefa233504a39529d/coverage-5.0.1-cp37-cp37m-manylinux1_x86_64.whl (226kB) | |||
100% |████████████████████████████████| 235kB 3.7MB/s | |||
Requirement already satisfied: chardet<3.1.0,>=3.0.2 in /usr/lib/python3/dist-packages (from requests>=2.20.0->berserk==0.3.1->-r requirements.txt (line 12)) | |||
Requirement already satisfied: idna<2.9,>=2.5 in /usr/lib/python3/dist-packages (from requests>=2.20.0->berserk==0.3.1->-r requirements.txt (line 12)) | |||
Collecting | Requirement already satisfied: urllib3!=1.25.0,!=1.25.1,<1.26,>=1.21.1 in /usr/lib/python3/dist-packages (from requests>=2.20.0->berserk==0.3.1->-r requirements.txt (line 12)) | ||
Requirement already satisfied: certifi>=2017.4.17 in /usr/lib/python3/dist-packages (from requests>=2.20.0->berserk==0.3.1->-r requirements.txt (line 12)) | |||
Collecting | Requirement already satisfied: MarkupSafe>=0.23 in /usr/lib/python3/dist-packages (from Jinja2>=2.10.1->Flask==1.1.1->-r requirements.txt (line 21)) | ||
Collecting zope.event (from zope.schema->interface==2.11.1->-r requirements.txt (line 39)) | |||
Collecting | Using cached https://files.pythonhosted.org/packages/c5/96/361edb421a077a4c208b4a5c212737d78ae03ce67fbbcd01621c49f332d1/zope.event-4.4-py2.py3-none-any.whl | ||
Collecting importlib-metadata>=0.12; python_version < "3.8" (from pluggy>=0.7->pytest==3.8.2->-r requirements.txt (line 44)) | |||
Collecting | Using cached https://files.pythonhosted.org/packages/e9/71/1a1e0ed0981bb6a67bce55a210f168126b7ebd2065958673797ea66489ca/importlib_metadata-1.3.0-py2.py3-none-any.whl | ||
Collecting zipp>=0.5 (from importlib-metadata>=0.12; python_version < "3.8"->pluggy>=0.7->pytest==3.8.2->-r requirements.txt (line 44)) | |||
Using cached https://files.pythonhosted.org/packages/74/3d/1ee25a26411ba0401b43c6376d2316a71addcc72ef8690b101b4ea56d76a/zipp-0.6.0-py2.py3-none-any.whl | |||
Building wheels for collected packages: imutils, PyYAML, interface, future, Flask-Silk | |||
Running setup.py bdist_wheel for imutils ... done | |||
Stored in directory: /root/.cache/pip/wheels/16/84/1f/bf88641293cda2c8be81a5c4b8ca973dd9125a6dc3767417fd | |||
Collecting | Running setup.py bdist_wheel for PyYAML ... done | ||
Downloading https://files.pythonhosted.org/packages/ | Stored in directory: /root/.cache/pip/wheels/ad/56/bc/1522f864feb2a358ea6f1a92b4798d69ac783a28e80567a18b | ||
100% |████████████████████████████████| 92kB | Running setup.py bdist_wheel for interface ... done | ||
Collecting | Stored in directory: /root/.cache/pip/wheels/67/ff/9c/32ef7f63060382c02ba8b1f8f33fed59987378e119da38835f | ||
Running setup.py bdist_wheel for future ... done | |||
Stored in directory: /root/.cache/pip/wheels/8b/99/a0/81daf51dcd359a9377b110a8a886b3895921802d2fc1b2397e | |||
Running setup.py bdist_wheel for Flask-Silk ... done | |||
Stored in directory: /root/.cache/pip/wheels/58/d6/38/94efca8a2a27bdbfb771ef358684f0621a5d99481c8a506f9a | |||
Successfully built imutils PyYAML interface future Flask-Silk | |||
Installing collected packages: numpy, opencv-python, python-chess, ndjson, requests, berserk, python-lichess, imutils, click, Werkzeug, Jinja2, itsdangerous, Flask, aniso8601, Flask-RESTful, future, Flask-Silk, Flask-AutoIndex, PyYAML, mss, Pillow, jsonpickle, zope.event, zope.schema, interface, py, atomicwrites, more-itertools, zipp, importlib-metadata, pluggy, attrs, pytest, cycler, kiwisolver, pyparsing, matplotlib, scipy, coverage, pytest-cov | |||
Found existing installation: requests 2.18.4 | |||
Not uninstalling requests at /usr/lib/python3/dist-packages, outside environment /usr | |||
Found existing installation: PyYAML 3.12 | |||
Not uninstalling pyyaml at /usr/lib/python3/dist-packages, outside environment /usr | |||
Found existing installation: Pillow 5.1.0 | |||
Not uninstalling pillow at /usr/lib/python3/dist-packages, outside environment /usr | |||
Successfully installed Flask-1.1.1 Flask-AutoIndex-0.6.4 Flask-RESTful-0.3.7 Flask-Silk-0.2 Jinja2-2.10.3 Pillow-6.2.1 PyYAML-5.1 Werkzeug-0.16.0 aniso8601-8.0.0 atomicwrites-1.3.0 attrs-19.3.0 berserk-0.3.1 click-7.0 coverage-5.0.1 cycler-0.10.0 future-0.18.2 importlib-metadata-1.3.0 imutils-0.5.3 interface-2.11.1 itsdangerous-1.1.0 jsonpickle-1.2 kiwisolver-1.1.0 matplotlib-2.2.3 more-itertools-8.0.2 mss-4.0.3 ndjson-0.1.0 numpy-1.18.0 opencv-python-4.1.2.30 pluggy-0.13.1 py-1.8.0 pyparsing-2.4.6 pytest-3.8.2 pytest-cov-2.8.1 python-chess-0.29.0 python-lichess-0.9 requests-2.22.0 scipy-1.2.2 zipp-0.6.0 zope.event-4.4 zope.schema-4.9.3 | |||
Collecting | |||
</source> | </source> | ||
=== Test === | === Test === | ||
<source lang='bash' highlight="1"> | <source lang='bash' highlight="1"> | ||
| Line 738: | Line 1,144: | ||
</source> | </source> | ||
== | == Raspbian 10 buster == | ||
=== Modify requirements.txt === | |||
As of 2019-12 there is no current opencv for Raspbian and a few work-arounds are necessary. | |||
<source lang='bash'> | |||
git diff | |||
diff --git a/pcwawc/requirements.txt b/pcwawc/requirements.txt | |||
index 019d524..a277b59 100644 | |||
--- a/pcwawc/requirements.txt | |||
+++ b/pcwawc/requirements.txt | |||
@@ -3,7 +3,7 @@ | |||
# runtime dependencies | |||
# | |||
# https://opencv-python-tutroals.readthedocs.io/en/latest/py_tutorials/py_tutorials.html | |||
-opencv-python==4.1.2.30 | |||
+opencv-python==4.1.* | |||
# python-chess | |||
# https://buildmedia.readthedocs.org/media/pdf/python-chess/latest/python-chess.pdf | |||
python-chess==0.29.0 | |||
</source> | |||
=== Install === | |||
<source lang='bash' highlight="1-3"> | |||
scripts/install | |||
... | |||
# to avoid warning later | |||
pip3 install --no-cache-dir cairocffi | |||
</source> | |||
==== Issue undefined symbol: __atomic_fetch_add_8 ==== | |||
If you get: | |||
<pre> | |||
undefined symbol: __atomic_fetch_add_8 | |||
</pre> | |||
* https://github.com/EdjeElectronics/TensorFlow-Object-Detection-on-the-Raspberry-Pi/issues/67 | |||
define this: | |||
<source lang='bash'> | |||
export LD_PRELOAD=/usr/lib/arm-linux-gnueabihf/libatomic.so.1.2.0 | |||
</source> | |||
=== Test === | |||
<source lang='bash'> | |||
scripts/run --input ../Chess-Testmedia/TK_scholarsmate30.avi --event 'PlayChessWithaWebCam' --site 'Stuttgart-Germany' --black OTB1 --white OTB2 --round 1 --warp '[[81,18],[271,15],[268,203],[85,203]]' --rotation 90 --nomoves | |||
/usr/local/lib/python3.7/dist-packages/matplotlib/backends/backend_gtk3agg.py:16: UserWarning: The Gtk3Agg backend is known to not work on Python 3.x with pycairo. Try installing cairocffi. | |||
"The Gtk3Agg backend is known to not work on Python 3.x with pycairo. " | |||
[Event "PlayChessWithaWebCam"] | |||
[Site "Stuttgart-Germany"] | |||
[Date "2019-12-28 20:17:35"] | |||
[Round "1"] | |||
[White "OTB2"] | |||
[Black "OTB1"] | |||
[Result "1-0"] | |||
1. e4 e5 2. Qh5 Nc6 3. Bc4 Nf6 4. Qxf7# 1-0 | |||
</source> | |||
== Raspbian 9.8 stretch (not successful) == | |||
=== Install === | === Install === | ||
if the install fails e.g. with an Exception in urlopen you might want to restart the install. | if the install fails e.g. with an Exception in urlopen you might want to restart the install. | ||
| Line 814: | Line 1,274: | ||
The issue is that this project needs Python3.7 to work which can only be installed manually by compiling on stretch at this time (which i didn't try out ...) | The issue is that this project needs Python3.7 to work which can only be installed manually by compiling on stretch at this time (which i didn't try out ...) | ||
== Windows 7/10 == | |||
# Download Python 3.7.3 from https://www.python.org/downloads/release/python-373/ | |||
## https://www.python.org/ftp/python/3.7.3/python-3.7.3-amd64.exe | |||
=== Alternative: Install via Linux Subsystem === | |||
This installation uses a "hybrid approach" - we install the web elements e.g. javascript/css/fonts via bash script and then use the | |||
Windows native python and pip to proceed. | |||
* see https://docs.microsoft.com/de-de/windows/wsl/install-win10 with Ubuntu from the Microsoft Store | |||
then follow the linux instructions | |||
<source lang='bash'> | |||
sudo apt-get update | |||
sudo apt-get upgrade | |||
sudo apt-get install xdg-utils | |||
</source> | |||
Access files via Z: | |||
* https://superuser.com/a/1502631/166461 | |||
<source lang='bash'> | |||
cd pcwawc | |||
pip install -r requirements.txt | |||
cd .. | |||
set PYTHONPATH=.;%PYTHONPATH%; | |||
</source> | |||
Latest revision as of 08:21, 11 March 2025
| OsProject | |
|---|---|
| id | PlayChessWithAWebCam |
| state | active |
| owner | Wolfgang Fahl |
| title | Play Chess With A WebCam |
| url | https://github.com/WolfgangFahl/play-chess-with-a-webcam |
| version | 0.0.2 |
| description | |
| date | 2025-03-11 |
| since | 2019-10-21 |
| until | |
 Click here to comment
see PlayChessWithAWebCam
Click here to comment
see PlayChessWithAWebCam
Motivation
See MagneticSensorChessBoard1987 for the initial project of 1987. Time has moved on and the goals of the 1987 project can be achieved with less hardware and software in a more convenient manner these days.
Usecases
Play Chess With A Webcam
As a chess player given a physical board and a starting position in FEN notation and a webcam observing the board in a proper angle (e.g. from above) i want to play moves against an opponent that
- might sit directly in front of me
- might sit with a similar setup remotely in front of a physical board
- might play using some other remote means of communication
so that my moves are recorded and transmitted with the option to
- later analyze
- immediately analyze and if allowed by the oponent take back moves
If the oponent is not at the board I'll have to do his moves manually or later might use some kind of robot to do that for me ...
Detecting Moves by a WebCAM
As a chess player given a logical chess board setting in FEN notation (e.g. starting FEN that I have setup on my physical board being observed by a webcam in HD at e.g. 25 FPS I want to use a webcam to detect my next valid move e.g. e2-e4 so that the logical board changes to the new FEN e.g. (https://lichess.org/editor/rnbqkbnr/pppppppp/8/8/4P3/8/PPPP1PPP/RNBQKBNR_w_KQkq_-) and the move is available in Algebraic_Notation e.g. e2-e4 e.g. to be transferred via Universal_Chess_Interface or e.g. lichess.org
Process Chessgame webcam movie recording to create PGN
As a chess player
I want to process a given movie of a chessgame so that I get a Portable Game Notation of the game's moves
see
https://chess.stackexchange.com/questions/4695/tools-for-automated-notation-webcam-movie-to-pgn/4699
State of Project
As of 2019-12-28 version 0.0.1 has not been released yet. The state of the project is alpha and will be in beta in a few days.
There is already a lof of stuff to try out and to participate in this open source project.
There is a web frontend which you can try out. Sample videos are available at https://github.com/SteinscheisserKarl/Chess-Testmedia/ which you can check out with:
sudo apt-get install git-lfs
git clone https://github.com/SteinscheisserKarl/Chess-Testmedia/
cd Chess-Testmedia
git lfs install
git lfs pull
git clone https://github.com/WolfgangFahl/play-chess-with-a-webcam
cd play-chess-with-a-webcam
scripts/install
scripts/run --input ../Chess-Testmedia/TK_scholarsmate30.avi --event 'PlayChessWithaWebCam' --site 'Stuttgart-Germany' --black OTB1 --white OTB2 --round 1 --warp '[[81,18],[271,15],[268,203],[85,203]]' --rotation 90 --nomoves
to tryout one of the Scholars Mate example video's in command line mode
 or
or
scripts/runweb
for the default web cam or
scripts/runweb --input 1
if there is a second webcam installed.
You might want to click the corners of your chessboard to try out the warp function manually or click the .
The scripts:
- still
- record
are already useful for taking pictures and movie recordings of your chess match. The detection of the board and moves is not fully operational yet.
If you'd like to experiment a bit you can run the tests which will show some debug output.
Installation
Prerequisites: python3.7 (install script will check and try automatic installation in Ubuntu/MacOS)
git clone https://github.com/WolfgangFahl/play-chess-with-a-webcam
Cloning into 'play-chess-with-a-webcam'...
remote: Enumerating objects: 57, done.
remote: Counting objects: 100% (57/57), done.
remote: Compressing objects: 100% (40/40), done.
remote: Total 385 (delta 29), reused 34 (delta 17), pack-reused 328
Receiving objects: 100% (385/385), 1.79 MiB | 3.17 MiB/s, done.
Resolving deltas: 100% (244/244), done
cd play-chess-with-a-webcam
scripts/install
checking that python3 is installed on os Linux ...
/usr/bin/python3
checking that pip3 is installed on os Linux ...
installing pip3 from apt-package python3-pip
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following package was automatically installed and is no longer required:
libevent-core-2.1-6
Use 'sudo apt autoremove' to remove it.
The following additional packages will be installed:
libexpat1-dev libpython3-dev libpython3.6-dev python-pip-whl python3-dev
python3-setuptools python3-wheel python3.6-dev
Suggested packages:
python-setuptools-doc
The following NEW packages will be installed:
libexpat1-dev libpython3-dev libpython3.6-dev python-pip-whl python3-dev
python3-pip python3-setuptools python3-wheel python3.6-dev
0 upgraded, 9 newly installed, 0 to remove and 40 not upgraded.
Need to get 47,5 MB of archives.
After this operation, 81,7 MB of additional disk space will be used.
Do you want to continue? [Y/n] y
MacoS Macports
You might want to set python3
sudo port select --list pip
sudo port select --set pip3 pip37
sudo port select --list python
sudo port select --set python3 python37
Usage
WebUI
Menu
home description save folder videocam camera_alt bug_report crop keyboard_arrow_left keyboard_arrow_right rotate_right play_arrow
Command line usage
scripts/runweb -h
[2019-10-29 09:27:14,631] INFO in webchesscam: python src folder is /Users/wf/source/python/play-chess-with-a-webcam/src
[2019-10-29 09:27:14,646] INFO in webchesscam: Running on Darwin
usage: webchesscam.py [-h] [--port PORT] [--input INPUT] [--host HOST]
[--debug] [--rotation ROTATION] [--warp WARP]
WebChessCam
optional arguments:
-h, --help show this help message and exit
--port PORT port to run server at
--input INPUT Manually set the input device.
--host HOST host to allow access for
--debug show debug output
--rotation ROTATION rotation of chessboard
--warp WARP warp points
Recording
Still images
scripts/still
Video of match
scripts/record
Example Sources
OpenCV
Also in the examples/opencv directory you'll find:
- colorcluster.py
- histogramm.py
- hough_lines.py
- ...
hough lines
python3 examples/opencv/hough_lines.py testMedia/chessBoard002.jpg



histogramm / colorcluster

python3 examples/opencv/histogramm.py testMedia/chessBoard006.jpg

python3 examples/opencv/colorcluster.py testMedia/chessBoard006.jpg
Clusterization took 2.8 s for 1 channels
Clusterization took 4.5 s for 2 channels
Clusterization took 6.7 s for 3 channels

Testing
scripts/test
---------- coverage: platform darwin, python 3.7.4-final-0 -----------
Name Stmts Miss Cover
------------------------------------------------
src/Args.py 10 7 30%
src/Board.py 79 5 94%
src/BoardDetector.py 53 1 98%
src/BoardFinder.py 185 12 94%
src/Cell.py 10 3 70%
src/ChessCam.py 85 59 31%
src/Environment.py 19 0 100%
src/FPSCheck.py 17 0 100%
src/Field.py 98 1 99%
src/Game.py 80 11 86%
src/Histogram.py 72 0 100%
src/InputManager.py 41 29 29%
src/JsonAbleMixin.py 32 7 78%
src/MovementDetector.py 55 40 27%
src/RunningStats.py 61 4 93%
src/StateDetector.py 102 7 93%
src/Video.py 275 101 63%
src/WebApp.py 175 84 52%
src/YamlAbleMixin.py 22 4 82%
src/ciede2000.py 88 9 90%
src/imutils/__init__.py 1 0 100%
src/imutils/perspective.py 25 0 100%
src/mathUtils.py 48 7 85%
src/test_Args.py 16 0 100%
src/test_Board.py 99 8 92%
src/test_BoardDetector.py 87 0 100%
src/test_ChessCam.py 4 0 100%
src/test_Field.py 19 0 100%
src/test_Game.py 48 0 100%
src/test_Histogram.py 31 1 97%
src/test_OpenCV_version.py 6 0 100%
src/test_RunningStats.py 35 0 100%
src/test_StateDetector.py 14 0 100%
src/test_Video.py 68 1 99%
src/test_Warp.py 46 2 96%
src/test_findBoard.py 44 0 100%
src/webchesscam.py 94 39 59%
------------------------------------------------
TOTAL 2244 442 80%
================== 38 passed, 4 warnings in 94.81s (0:01:34)
Hardware
see e.g Raspberry_PI_Chessboard_Camera
Projects
UCI compatible GUIs
XBoard
see XBoard
Open Source Projects
- https://github.com/jayhack/CVChess
- https://classes.engineering.wustl.edu/ese205/core/index.php?title=CV_Chess
- https://github.com/swenae/chesscam
- https://github.com/Rr9/ChessStory
- https://github.com/FabioBCI/pyChess
- http://www.romanmueller.de/chesscamera
- https://github.com/TheKrystek/ChessCam
- https://gitlab.fing.edu.uy/aricca/chessTrack
- https://github.com/maciejczyzewski/neural-chessboard
- https://github.com/jialinding/ChessVision
- https://github.com/SukritGupta17/Chess-Board-Recognition
- http://chessgrabber.nicolaas.net
Commercial
Links
- https://en.wikipedia.org/wiki/Universal_Chess_Interface
- https://en.wikipedia.org/wiki/Chess_symbols_in_Unicode
- https://buildmedia.readthedocs.org/media/pdf/python-chess/
- https://en.chessbase.com/post/how-to-build-your-own-usb-electronic-che-board
- https://www.raspberrypi.org/magpi/chess-board-raspberry-pi/
- https://hobbylark.com/board-games/Top-5-Free-Chess-GUIs-for-UCI-Engines
- https://github.com/ornicar/lila
- https://www.chessprogramming.org
- https://www.chessprogramming.org/UCI
- https://www.chessprogramming.org/Piece_Recognition
- http://www.nandanbanerjee.com/index.php?option=com_content&view=article&id=71:buttercup-chess-robot&catid=78&Itemid=470
- http://cs.uef.fi/~franti/chesscam/
- https://www.fide.com/contacts
- https://www.kickstarter.com/projects/infivention/square-off-worlds-smartest-chess-board-relaunched
- https://www.heise.de/make/projekte/ChessCamera-Schachcomputer-mit-Bilderkennung-2170835.html
- http://usbchessboard.yolasite.com/
- https://en.chessbase.com/post/you-built-what-a-giant-robotic-chess-set
- https://ieeexplore.ieee.org/abstract/document/6727033
- http://wiki.ros.org/tuw_checkerboard
- http://js1k.com/2010-first/demo/750
- http://codebazaar.blogspot.com/2011/08/chess-board-recognition-project-part-1.html
Research
see also
Stackexchange
- https://dsp.stackexchange.com/questions/24235/segmenting-and-labeling-chessboards-through-computer-vision
- https://codereview.stackexchange.com/questions/220915/python-chess-game
- https://stackoverflow.com/questions/27520991/opencv-best-way-to-detect-corners-on-chessboard
- https://stackoverflow.com/questions/5906170/detecting-chess-moves-from-successive-image-differences-using-opencv-tools
- https://chess.stackexchange.com/questions/4695/tools-for-automated-notation-webcam-movie-to-pgn/4751#4751
Videos
Source Code
play-chess-with-a-webcam
see github fork at
Written in python using python3.7. see https://unix.stackexchange.com/a/410851/38701 for selection your python version on Ubuntu
Code Structure
click classes to see source code at Play Chess With A WebCam github repository
Development Environment
https://www.liclipse.com/ is recommended since it alows interactive graphical debugging and editing with syntax and error hints.
OS-Support
MacOS High Sierra 10.13.6
MacPorts: 2.6.2
Install
scripts/install
checking that python3 is installed on os Darwin ...
/opt/local/bin/python3
checking that pip3 is installed on os Darwin ...
/opt/local/bin/pip3
Requirement already satisfied: opencv-python in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from -r requirements.txt (line 2)) (4.1.1.26)
Requirement already satisfied: pytest in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from -r requirements.txt (line 4)) (5.2.1)
Collecting matplotlib (from -r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/c3/8b/af9e0984f5c0df06d3fab0bf396eb09cbf05f8452de4e9502b182f59c33b/matplotlib-3.1.1-cp37-cp37m-macosx_10_6_intel.macosx_10_9_intel.macosx_10_9_x86_64.macosx_10_10_intel.macosx_10_10_x86_64.whl (14.4MB)
|████████████████████████████████| 14.4MB 7.4MB/s
Collecting scipy (from -r requirements.txt (line 8))
Downloading https://files.pythonhosted.org/packages/d5/06/1a696649f4b2e706c509cb9333fdc6331fbe71251cede945f9e1fa13ea34/scipy-1.3.1-cp37-cp37m-macosx_10_6_intel.macosx_10_9_intel.macosx_10_9_x86_64.macosx_10_10_intel.macosx_10_10_x86_64.whl (27.7MB)
|████████████████████████████████| 27.7MB 7.1MB/s
Collecting pytest-cov (from -r requirements.txt (line 10))
Downloading https://files.pythonhosted.org/packages/b9/54/3673ee8be482f81527678ac894276223b9814bb7262e4f730469bb7bf70e/pytest_cov-2.8.1-py2.py3-none-any.whl
Collecting python-chess (from -r requirements.txt (line 12))
Downloading https://files.pythonhosted.org/packages/58/70/72dc875a30ac7f26e0bec45714d67b19e0f498de920323b906995a741a88/python_chess-0.28.3-py3-none-any.whl (127kB)
|████████████████████████████████| 133kB 7.1MB/s
Requirement already satisfied: numpy>=1.14.5 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from opencv-python->-r requirements.txt (line 2)) (1.16.4)
Requirement already satisfied: attrs>=17.4.0 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (19.1.0)
Requirement already satisfied: more-itertools>=4.0.0 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (7.2.0)
Requirement already satisfied: py>=1.5.0 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (1.8.0)
Requirement already satisfied: pluggy<1.0,>=0.12 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (0.13.0)
Requirement already satisfied: atomicwrites>=1.0 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (1.3.0)
Requirement already satisfied: wcwidth in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (0.1.7)
Requirement already satisfied: importlib-metadata>=0.12; python_version < "3.8" in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (0.23)
Requirement already satisfied: packaging in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (19.2)
Collecting kiwisolver>=1.0.1 (from matplotlib->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/df/93/8bc9b52a8846be2b9572aa0a7c881930939b06e4abe1162da6a0430b794f/kiwisolver-1.1.0-cp37-cp37m-macosx_10_6_intel.macosx_10_9_intel.macosx_10_9_x86_64.macosx_10_10_intel.macosx_10_10_x86_64.whl (113kB)
|████████████████████████████████| 122kB 8.3MB/s
Requirement already satisfied: pyparsing!=2.0.4,!=2.1.2,!=2.1.6,>=2.0.1 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from matplotlib->-r requirements.txt (line 6)) (2.4.2)
Requirement already satisfied: python-dateutil>=2.1 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from matplotlib->-r requirements.txt (line 6)) (2.8.0)
Collecting cycler>=0.10 (from matplotlib->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/f7/d2/e07d3ebb2bd7af696440ce7e754c59dd546ffe1bbe732c8ab68b9c834e61/cycler-0.10.0-py2.py3-none-any.whl
Collecting coverage>=4.4 (from pytest-cov->-r requirements.txt (line 10))
Downloading https://files.pythonhosted.org/packages/93/07/8302163cdbe2008441aa69f2119750110fde15ffd8a56a687311b143365a/coverage-4.5.4-cp37-cp37m-macosx_10_13_x86_64.whl (181kB)
|████████████████████████████████| 184kB 8.4MB/s
Requirement already satisfied: zipp>=0.5 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from importlib-metadata>=0.12; python_version < "3.8"->pytest->-r requirements.txt (line 4)) (0.6.0)
Requirement already satisfied: six in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from packaging->pytest->-r requirements.txt (line 4)) (1.12.0)
Requirement already satisfied: setuptools in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from kiwisolver>=1.0.1->matplotlib->-r requirements.txt (line 6)) (41.0.1)
Installing collected packages: kiwisolver, cycler, matplotlib, scipy, coverage, pytest-cov, python-chess
Successfully installed coverage-4.5.4 cycler-0.10.0 kiwisolver-1.1.0 matplotlib-3.1.1 pytest-cov-2.8.1 python-chess-0.28.3 scipy-1.3.1
Test
scripts/test
=========================================== test session starts ===========================================
platform darwin -- Python 3.7.3, pytest-5.2.1, py-1.8.0, pluggy-0.13.0
rootdir: /Users/wf/source/python/play-chess-with-a-webcam
plugins: cov-2.8.1
collected 11 items
src/test_Board.py . [ 9%]
src/test_ChessCam.py . [ 18%]
src/test_OpenCV_version.py . [ 27%]
src/test_Video.py ... [ 54%]
src/test_findBoard.py ..... [100%]
---------- coverage: platform darwin, python 3.7.3-final-0 -----------
Name Stmts Miss Cover
------------------------------------------------
src/Args.py 10 7 30%
src/Board.py 33 3 91%
src/BoardFinder.py 186 12 94%
src/Cell.py 10 4 60%
src/ChessCam.py 86 59 31%
src/InputManager.py 57 37 35%
src/MovementDetector.py 55 40 27%
src/StateDetector.py 92 75 18%
src/Video.py 133 48 64%
src/mathUtils.py 49 25 49%
src/test_Board.py 23 3 87%
src/test_ChessCam.py 4 0 100%
src/test_OpenCV_version.py 6 0 100%
src/test_Video.py 28 0 100%
src/test_findBoard.py 49 0 100%
------------------------------------------------
TOTAL 821 313 62%
=========================================== 11 passed in 37.60s ===========================================
Ubuntu 18.04.3 LTS bionic beaver
Upgrade Python to 3.7
see https://linuxize.com/post/how-to-install-python-3-7-on-ubuntu-18-04/
sudo add-apt-repository ppa:deadsnakes/ppa
sudo apt-install python3.7
# install tkinter
sudo apt-get install python3-tk
make python3.7 the default python3
Install
scripts/install
scripts/install
Bootstrap already downloaded
Material Design Lite already downloaded
Material Design Icons already downloaded
chessboard.js already downloaded
chessboard-1.0.0.css already downloaded
chessboard-1.0.0.min.css already downloaded
js/jquery-3.4.1.min.js already downloaded
chess.js already downloaded
checking that python3 is installed on os Linux ...
/usr/bin/python3
checking that pip3 is installed on os Linux ...
/usr/bin/pip3
Collecting opencv-python==4.1.2.30 (from -r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/d8/38/60de02a4c9013b14478a3f681a62e003c7489d207160a4d7df8705a682e7/opencv_python-4.1.2.30-cp37-cp37m-manylinux1_x86_64.whl (28.3MB)
100% |████████████████████████████████| 28.3MB 50kB/s
Collecting python-chess==0.29.0 (from -r requirements.txt (line 9))
Using cached https://files.pythonhosted.org/packages/63/eb/003a6c069c0208e169165acd2d90665fa3901baab19b5fa26603d86b7193/python_chess-0.29.0-py3-none-any.whl
Collecting berserk==0.3.1 (from -r requirements.txt (line 12))
Using cached https://files.pythonhosted.org/packages/bb/09/d25b49f70145e07a5ca7aa1a5ff9bf5499ba0754341a592a2e8d165ed621/berserk-0.3.1-py2.py3-none-any.whl
Collecting python-lichess==0.9 (from -r requirements.txt (line 14))
Using cached https://files.pythonhosted.org/packages/23/07/6cfaa4ef2649d705defc3e7c8ff7ed3a3bb467400325d00ad9da3acedf39/python_lichess-0.9-py3-none-any.whl
Collecting imutils==0.5.3 (from -r requirements.txt (line 16))
Using cached https://files.pythonhosted.org/packages/b5/94/46dcae8c061e28be31bcaa55c560cb30ee9403c9a4bb2659768ec1b9eb7d/imutils-0.5.3.tar.gz
Collecting Flask==1.1.1 (from -r requirements.txt (line 21))
Using cached https://files.pythonhosted.org/packages/9b/93/628509b8d5dc749656a9641f4caf13540e2cdec85276964ff8f43bbb1d3b/Flask-1.1.1-py2.py3-none-any.whl
Collecting Flask-RESTful==0.3.7 (from -r requirements.txt (line 22))
Using cached https://files.pythonhosted.org/packages/17/44/6e490150ee443ca81d5f88b61bb4bbb133d44d75b0b716ebe92489508da4/Flask_RESTful-0.3.7-py2.py3-none-any.whl
Collecting Flask-AutoIndex==0.6.4 (from -r requirements.txt (line 23))
Using cached https://files.pythonhosted.org/packages/dc/43/26df9c0c0e7d3de98ba7cbe89e7b88c280e40c87073025171d2d702d0b5f/Flask_AutoIndex-0.6.4-py3-none-any.whl
Collecting PyYAML==5.1 (from -r requirements.txt (line 25))
Using cached https://files.pythonhosted.org/packages/9f/2c/9417b5c774792634834e730932745bc09a7d36754ca00acf1ccd1ac2594d/PyYAML-5.1.tar.gz
Collecting mss==4.0.3 (from -r requirements.txt (line 27))
Using cached https://files.pythonhosted.org/packages/67/2a/8e26437bcc840e19ca5290897d47f5405e302af27d4a6401e0b0edc39942/mss-4.0.3-py2.py3-none-any.whl
Collecting Pillow==6.2.1 (from -r requirements.txt (line 29))
Downloading https://files.pythonhosted.org/packages/89/3e/31c2e5385d7588016c6f7ac552e81c3fff2bef4bc61b6f82f8177752405c/Pillow-6.2.1-cp37-cp37m-manylinux1_x86_64.whl (2.1MB)
100% |████████████████████████████████| 2.1MB 678kB/s
Collecting jsonpickle==1.2 (from -r requirements.txt (line 35))
Using cached https://files.pythonhosted.org/packages/07/07/c157520a3ebd166c8c24c6ae0ecae7c3968eb4653ff0e5af369bb82f004d/jsonpickle-1.2-py2.py3-none-any.whl
Collecting interface==2.11.1 (from -r requirements.txt (line 39))
Using cached https://files.pythonhosted.org/packages/f9/80/7283dfe76ceb7eb1868cf97b8c8cb3a988f80757921341f95d5420de2a6e/Interface-2.11.1.tar.gz
Collecting pytest==3.8.2 (from -r requirements.txt (line 44))
Using cached https://files.pythonhosted.org/packages/08/e0/a4945a06380802264b3416d788ad607588c334662b6cd0af54144c45912d/pytest-3.8.2-py2.py3-none-any.whl
Collecting matplotlib==2.2.3 (from -r requirements.txt (line 46))
Downloading https://files.pythonhosted.org/packages/52/46/ff47fea8e5c528c497fc385c95887131c4319a3411814ba9a766b66a9367/matplotlib-2.2.3-cp37-cp37m-manylinux1_x86_64.whl (12.6MB)
100% |████████████████████████████████| 12.6MB 116kB/s
Collecting scipy==1.2.2 (from -r requirements.txt (line 48))
Downloading https://files.pythonhosted.org/packages/f3/84/2cc37b97e96da0be03d5dcebdd967214cae14b14b0131398b374ea89c50e/scipy-1.2.2-cp37-cp37m-manylinux1_x86_64.whl (24.8MB)
100% |████████████████████████████████| 24.8MB 59kB/s
Collecting pytest-cov==2.8.1 (from -r requirements.txt (line 50))
Using cached https://files.pythonhosted.org/packages/b9/54/3673ee8be482f81527678ac894276223b9814bb7262e4f730469bb7bf70e/pytest_cov-2.8.1-py2.py3-none-any.whl
Collecting numpy>=1.14.5 (from opencv-python==4.1.2.30->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/20/53/127cb49435bcf5d841baf8eafa030931c62a9eac577a641f8c2293d23371/numpy-1.18.0-cp37-cp37m-manylinux1_x86_64.whl (20.1MB)
100% |████████████████████████████████| 20.1MB 70kB/s
Collecting ndjson==0.1.0 (from berserk==0.3.1->-r requirements.txt (line 12))
Using cached https://files.pythonhosted.org/packages/39/ba/0628840da7b61fb63a6a0e030291a7a5e5d393a51cbcb27ded8b2a838aa9/ndjson-0.1.0-py2.py3-none-any.whl
Collecting requests>=2.20.0 (from berserk==0.3.1->-r requirements.txt (line 12))
Using cached https://files.pythonhosted.org/packages/51/bd/23c926cd341ea6b7dd0b2a00aba99ae0f828be89d72b2190f27c11d4b7fb/requests-2.22.0-py2.py3-none-any.whl
Requirement already satisfied: six in /usr/lib/python3/dist-packages (from python-lichess==0.9->-r requirements.txt (line 14))
Collecting click>=5.1 (from Flask==1.1.1->-r requirements.txt (line 21))
Using cached https://files.pythonhosted.org/packages/fa/37/45185cb5abbc30d7257104c434fe0b07e5a195a6847506c074527aa599ec/Click-7.0-py2.py3-none-any.whl
Collecting Werkzeug>=0.15 (from Flask==1.1.1->-r requirements.txt (line 21))
Using cached https://files.pythonhosted.org/packages/ce/42/3aeda98f96e85fd26180534d36570e4d18108d62ae36f87694b476b83d6f/Werkzeug-0.16.0-py2.py3-none-any.whl
Collecting Jinja2>=2.10.1 (from Flask==1.1.1->-r requirements.txt (line 21))
Using cached https://files.pythonhosted.org/packages/65/e0/eb35e762802015cab1ccee04e8a277b03f1d8e53da3ec3106882ec42558b/Jinja2-2.10.3-py2.py3-none-any.whl
Collecting itsdangerous>=0.24 (from Flask==1.1.1->-r requirements.txt (line 21))
Using cached https://files.pythonhosted.org/packages/76/ae/44b03b253d6fade317f32c24d100b3b35c2239807046a4c953c7b89fa49e/itsdangerous-1.1.0-py2.py3-none-any.whl
Requirement already satisfied: pytz in /usr/lib/python3/dist-packages (from Flask-RESTful==0.3.7->-r requirements.txt (line 22))
Collecting aniso8601>=0.82 (from Flask-RESTful==0.3.7->-r requirements.txt (line 22))
Using cached https://files.pythonhosted.org/packages/eb/e4/787e104b58eadc1a710738d4e418d7e599e4e778e52cb8e5d5ef6ddd5833/aniso8601-8.0.0-py2.py3-none-any.whl
Collecting future>=0.13.0 (from Flask-AutoIndex==0.6.4->-r requirements.txt (line 23))
Using cached https://files.pythonhosted.org/packages/45/0b/38b06fd9b92dc2b68d58b75f900e97884c45bedd2ff83203d933cf5851c9/future-0.18.2.tar.gz
Collecting Flask-Silk>=0.2 (from Flask-AutoIndex==0.6.4->-r requirements.txt (line 23))
Using cached https://files.pythonhosted.org/packages/05/95/57667716765b21a8fcd0918ae4a99b5de60f8632d7d1a0b401609fbb28ab/Flask-Silk-0.2.tar.gz
Requirement already satisfied: zope.interface in /usr/lib/python3/dist-packages (from interface==2.11.1->-r requirements.txt (line 39))
Collecting zope.schema (from interface==2.11.1->-r requirements.txt (line 39))
Using cached https://files.pythonhosted.org/packages/3c/e6/5454a9d72372b73aec715bbded44a0311807dcf7869e2b7bcf196a8e92de/zope.schema-4.9.3-py2.py3-none-any.whl
Requirement already satisfied: setuptools in /usr/lib/python3/dist-packages (from pytest==3.8.2->-r requirements.txt (line 44))
Collecting py>=1.5.0 (from pytest==3.8.2->-r requirements.txt (line 44))
Using cached https://files.pythonhosted.org/packages/76/bc/394ad449851729244a97857ee14d7cba61ddb268dce3db538ba2f2ba1f0f/py-1.8.0-py2.py3-none-any.whl
Collecting atomicwrites>=1.0 (from pytest==3.8.2->-r requirements.txt (line 44))
Using cached https://files.pythonhosted.org/packages/52/90/6155aa926f43f2b2a22b01be7241be3bfd1ceaf7d0b3267213e8127d41f4/atomicwrites-1.3.0-py2.py3-none-any.whl
Collecting pluggy>=0.7 (from pytest==3.8.2->-r requirements.txt (line 44))
Using cached https://files.pythonhosted.org/packages/a0/28/85c7aa31b80d150b772fbe4a229487bc6644da9ccb7e427dd8cc60cb8a62/pluggy-0.13.1-py2.py3-none-any.whl
Collecting attrs>=17.4.0 (from pytest==3.8.2->-r requirements.txt (line 44))
Using cached https://files.pythonhosted.org/packages/a2/db/4313ab3be961f7a763066401fb77f7748373b6094076ae2bda2806988af6/attrs-19.3.0-py2.py3-none-any.whl
Collecting more-itertools>=4.0.0 (from pytest==3.8.2->-r requirements.txt (line 44))
Using cached https://files.pythonhosted.org/packages/68/03/0604cec1ea13c9f063dd50f900d1a36160334dd3cfb01fd0e638f61b46ba/more_itertools-8.0.2-py3-none-any.whl
Requirement already satisfied: python-dateutil>=2.1 in /usr/lib/python3/dist-packages (from matplotlib==2.2.3->-r requirements.txt (line 46))
Collecting cycler>=0.10 (from matplotlib==2.2.3->-r requirements.txt (line 46))
Using cached https://files.pythonhosted.org/packages/f7/d2/e07d3ebb2bd7af696440ce7e754c59dd546ffe1bbe732c8ab68b9c834e61/cycler-0.10.0-py2.py3-none-any.whl
Collecting kiwisolver>=1.0.1 (from matplotlib==2.2.3->-r requirements.txt (line 46))
Downloading https://files.pythonhosted.org/packages/93/f8/518fb0bb89860eea6ff1b96483fbd9236d5ee991485d0f3eceff1770f654/kiwisolver-1.1.0-cp37-cp37m-manylinux1_x86_64.whl (90kB)
100% |████████████████████████████████| 92kB 5.3MB/s
Collecting pyparsing!=2.0.4,!=2.1.2,!=2.1.6,>=2.0.1 (from matplotlib==2.2.3->-r requirements.txt (line 46))
Using cached https://files.pythonhosted.org/packages/5d/bc/1e58593167fade7b544bfe9502a26dc860940a79ab306e651e7f13be68c2/pyparsing-2.4.6-py2.py3-none-any.whl
Collecting coverage>=4.4 (from pytest-cov==2.8.1->-r requirements.txt (line 50))
Downloading https://files.pythonhosted.org/packages/ee/04/3d94488c04c5fa82eb21a04c82b3f4f1a54fc230496aefa233504a39529d/coverage-5.0.1-cp37-cp37m-manylinux1_x86_64.whl (226kB)
100% |████████████████████████████████| 235kB 3.7MB/s
Requirement already satisfied: chardet<3.1.0,>=3.0.2 in /usr/lib/python3/dist-packages (from requests>=2.20.0->berserk==0.3.1->-r requirements.txt (line 12))
Requirement already satisfied: idna<2.9,>=2.5 in /usr/lib/python3/dist-packages (from requests>=2.20.0->berserk==0.3.1->-r requirements.txt (line 12))
Requirement already satisfied: urllib3!=1.25.0,!=1.25.1,<1.26,>=1.21.1 in /usr/lib/python3/dist-packages (from requests>=2.20.0->berserk==0.3.1->-r requirements.txt (line 12))
Requirement already satisfied: certifi>=2017.4.17 in /usr/lib/python3/dist-packages (from requests>=2.20.0->berserk==0.3.1->-r requirements.txt (line 12))
Requirement already satisfied: MarkupSafe>=0.23 in /usr/lib/python3/dist-packages (from Jinja2>=2.10.1->Flask==1.1.1->-r requirements.txt (line 21))
Collecting zope.event (from zope.schema->interface==2.11.1->-r requirements.txt (line 39))
Using cached https://files.pythonhosted.org/packages/c5/96/361edb421a077a4c208b4a5c212737d78ae03ce67fbbcd01621c49f332d1/zope.event-4.4-py2.py3-none-any.whl
Collecting importlib-metadata>=0.12; python_version < "3.8" (from pluggy>=0.7->pytest==3.8.2->-r requirements.txt (line 44))
Using cached https://files.pythonhosted.org/packages/e9/71/1a1e0ed0981bb6a67bce55a210f168126b7ebd2065958673797ea66489ca/importlib_metadata-1.3.0-py2.py3-none-any.whl
Collecting zipp>=0.5 (from importlib-metadata>=0.12; python_version < "3.8"->pluggy>=0.7->pytest==3.8.2->-r requirements.txt (line 44))
Using cached https://files.pythonhosted.org/packages/74/3d/1ee25a26411ba0401b43c6376d2316a71addcc72ef8690b101b4ea56d76a/zipp-0.6.0-py2.py3-none-any.whl
Building wheels for collected packages: imutils, PyYAML, interface, future, Flask-Silk
Running setup.py bdist_wheel for imutils ... done
Stored in directory: /root/.cache/pip/wheels/16/84/1f/bf88641293cda2c8be81a5c4b8ca973dd9125a6dc3767417fd
Running setup.py bdist_wheel for PyYAML ... done
Stored in directory: /root/.cache/pip/wheels/ad/56/bc/1522f864feb2a358ea6f1a92b4798d69ac783a28e80567a18b
Running setup.py bdist_wheel for interface ... done
Stored in directory: /root/.cache/pip/wheels/67/ff/9c/32ef7f63060382c02ba8b1f8f33fed59987378e119da38835f
Running setup.py bdist_wheel for future ... done
Stored in directory: /root/.cache/pip/wheels/8b/99/a0/81daf51dcd359a9377b110a8a886b3895921802d2fc1b2397e
Running setup.py bdist_wheel for Flask-Silk ... done
Stored in directory: /root/.cache/pip/wheels/58/d6/38/94efca8a2a27bdbfb771ef358684f0621a5d99481c8a506f9a
Successfully built imutils PyYAML interface future Flask-Silk
Installing collected packages: numpy, opencv-python, python-chess, ndjson, requests, berserk, python-lichess, imutils, click, Werkzeug, Jinja2, itsdangerous, Flask, aniso8601, Flask-RESTful, future, Flask-Silk, Flask-AutoIndex, PyYAML, mss, Pillow, jsonpickle, zope.event, zope.schema, interface, py, atomicwrites, more-itertools, zipp, importlib-metadata, pluggy, attrs, pytest, cycler, kiwisolver, pyparsing, matplotlib, scipy, coverage, pytest-cov
Found existing installation: requests 2.18.4
Not uninstalling requests at /usr/lib/python3/dist-packages, outside environment /usr
Found existing installation: PyYAML 3.12
Not uninstalling pyyaml at /usr/lib/python3/dist-packages, outside environment /usr
Found existing installation: Pillow 5.1.0
Not uninstalling pillow at /usr/lib/python3/dist-packages, outside environment /usr
Successfully installed Flask-1.1.1 Flask-AutoIndex-0.6.4 Flask-RESTful-0.3.7 Flask-Silk-0.2 Jinja2-2.10.3 Pillow-6.2.1 PyYAML-5.1 Werkzeug-0.16.0 aniso8601-8.0.0 atomicwrites-1.3.0 attrs-19.3.0 berserk-0.3.1 click-7.0 coverage-5.0.1 cycler-0.10.0 future-0.18.2 importlib-metadata-1.3.0 imutils-0.5.3 interface-2.11.1 itsdangerous-1.1.0 jsonpickle-1.2 kiwisolver-1.1.0 matplotlib-2.2.3 more-itertools-8.0.2 mss-4.0.3 ndjson-0.1.0 numpy-1.18.0 opencv-python-4.1.2.30 pluggy-0.13.1 py-1.8.0 pyparsing-2.4.6 pytest-3.8.2 pytest-cov-2.8.1 python-chess-0.29.0 python-lichess-0.9 requests-2.22.0 scipy-1.2.2 zipp-0.6.0 zope.event-4.4 zope.schema-4.9.3
Test
scripts/test
============================= test session starts =============================
platform linux -- Python 3.6.8, pytest-5.2.1, py-1.8.0, pluggy-0.13.0
rootdir: /home/wf/source/python/play-chess-with-a-webcam
plugins: cov-2.8.1
collected 11 items
src/test_Board.py . [ 9%]
src/test_ChessCam.py . [ 18%]
src/test_OpenCV_version.py . [ 27%]
src/test_Video.py ... [ 54%]
src/test_findBoard.py ..... [100%]
----------- coverage: platform linux, python 3.6.8-final-0 -----------
Name Stmts Miss Cover
------------------------------------------------
src/Args.py 10 7 30%
src/Board.py 33 3 91%
src/BoardFinder.py 186 12 94%
src/Cell.py 10 4 60%
src/ChessCam.py 86 59 31%
src/InputManager.py 57 37 35%
src/MovementDetector.py 55 40 27%
src/StateDetector.py 92 75 18%
src/Video.py 133 48 64%
src/mathUtils.py 49 25 49%
src/test_Board.py 23 3 87%
src/test_ChessCam.py 4 0 100%
src/test_OpenCV_version.py 6 0 100%
src/test_Video.py 28 0 100%
src/test_findBoard.py 49 0 100%
------------------------------------------------
TOTAL 821 313 62%
============================= 11 passed in 32.41s =============================
Raspbian 10 buster
Modify requirements.txt
As of 2019-12 there is no current opencv for Raspbian and a few work-arounds are necessary.
git diff
diff --git a/pcwawc/requirements.txt b/pcwawc/requirements.txt
index 019d524..a277b59 100644
--- a/pcwawc/requirements.txt
+++ b/pcwawc/requirements.txt
@@ -3,7 +3,7 @@
# runtime dependencies
#
# https://opencv-python-tutroals.readthedocs.io/en/latest/py_tutorials/py_tutorials.html
-opencv-python==4.1.2.30
+opencv-python==4.1.*
# python-chess
# https://buildmedia.readthedocs.org/media/pdf/python-chess/latest/python-chess.pdf
python-chess==0.29.0
Install
scripts/install
...
# to avoid warning later
pip3 install --no-cache-dir cairocffi
Issue undefined symbol: __atomic_fetch_add_8
If you get:
undefined symbol: __atomic_fetch_add_8
define this:
export LD_PRELOAD=/usr/lib/arm-linux-gnueabihf/libatomic.so.1.2.0
Test
scripts/run --input ../Chess-Testmedia/TK_scholarsmate30.avi --event 'PlayChessWithaWebCam' --site 'Stuttgart-Germany' --black OTB1 --white OTB2 --round 1 --warp '[[81,18],[271,15],[268,203],[85,203]]' --rotation 90 --nomoves
/usr/local/lib/python3.7/dist-packages/matplotlib/backends/backend_gtk3agg.py:16: UserWarning: The Gtk3Agg backend is known to not work on Python 3.x with pycairo. Try installing cairocffi.
"The Gtk3Agg backend is known to not work on Python 3.x with pycairo. "
[Event "PlayChessWithaWebCam"]
[Site "Stuttgart-Germany"]
[Date "2019-12-28 20:17:35"]
[Round "1"]
[White "OTB2"]
[Black "OTB1"]
[Result "1-0"]
1. e4 e5 2. Qh5 Nc6 3. Bc4 Nf6 4. Qxf7# 1-0
Raspbian 9.8 stretch (not successful)
Install
if the install fails e.g. with an Exception in urlopen you might want to restart the install.
scripts/install
checking that python3 is installed on os Linux ...
/usr/bin/python3
checking that pip3 is installed on os Linux ...
/usr/bin/pip3
Collecting opencv-python (from -r requirements.txt (line 2))
Using cached https://www.piwheels.org/simple/opencv-python/opencv_python-3.4.4.19-cp35-cp35m-linux_armv7l.whl
Collecting pytest (from -r requirements.txt (line 4))
Using cached https://files.pythonhosted.org/packages/0c/91/d68f68ce54cd3e8afa1ef73ea1ad44df2438521b64c0820e5fd9b9f13b7d/pytest-5.2.1-py3-none-any.whl
Collecting matplotlib (from -r requirements.txt (line 6))
Using cached https://www.piwheels.org/simple/matplotlib/matplotlib-3.0.3-cp35-cp35m-linux_armv7l.whl
Collecting scipy (from -r requirements.txt (line 8))
Using cached https://www.piwheels.org/simple/scipy/scipy-1.3.1-cp35-cp35m-linux_armv7l.whl
Collecting pytest-cov (from -r requirements.txt (line 10))
Using cached https://files.pythonhosted.org/packages/b9/54/3673ee8be482f81527678ac894276223b9814bb7262e4f730469bb7bf70e/pytest_cov-2.8.1-py2.py3-none-any.whl
Collecting python-chess (from -r requirements.txt (line 12))
Using cached https://files.pythonhosted.org/packages/58/70/72dc875a30ac7f26e0bec45714d67b19e0f498de920323b906995a741a88/python_chess-0.28.3-py3-none-any.whl
Requirement already satisfied: numpy>=1.12.1 in /usr/lib/python3/dist-packages (from opencv-python->-r requirements.txt (line 2))
Collecting pathlib2>=2.2.0; python_version < "3.6" (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/e9/45/9c82d3666af4ef9f221cbb954e1d77ddbb513faf552aea6df5f37f1a4859/pathlib2-2.3.5-py2.py3-none-any.whl
Collecting packaging (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/cf/94/9672c2d4b126e74c4496c6b3c58a8b51d6419267be9e70660ba23374c875/packaging-19.2-py2.py3-none-any.whl
Collecting atomicwrites>=1.0 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/52/90/6155aa926f43f2b2a22b01be7241be3bfd1ceaf7d0b3267213e8127d41f4/atomicwrites-1.3.0-py2.py3-none-any.whl
Collecting pluggy<1.0,>=0.12 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/92/c7/48439f7d5fd6bddb4c04b850bb862b42e3e2b98570040dfaf68aedd8114b/pluggy-0.13.0-py2.py3-none-any.whl
Collecting py>=1.5.0 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/76/bc/394ad449851729244a97857ee14d7cba61ddb268dce3db538ba2f2ba1f0f/py-1.8.0-py2.py3-none-any.whl (83kB)
100% |████████████████████████████████| 92kB 2.1MB/s
Collecting importlib-metadata>=0.12; python_version < "3.8" (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/f6/d2/40b3fa882147719744e6aa50ac39cf7a22a913cbcba86a0371176c425a3b/importlib_metadata-0.23-py2.py3-none-any.whl
Collecting attrs>=17.4.0 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/a2/db/4313ab3be961f7a763066401fb77f7748373b6094076ae2bda2806988af6/attrs-19.3.0-py2.py3-none-any.whl
Collecting wcwidth (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/7e/9f/526a6947247599b084ee5232e4f9190a38f398d7300d866af3ab571a5bfe/wcwidth-0.1.7-py2.py3-none-any.whl
Collecting more-itertools>=4.0.0 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/45/dc/3241eef99eb45f1def35cf93af35d1cf9ef4c0991792583b8f33ea41b092/more_itertools-7.2.0-py3-none-any.whl (57kB)
100% |████████████████████████████████| 61kB 2.0MB/s
Collecting kiwisolver>=1.0.1 (from matplotlib->-r requirements.txt (line 6))
Downloading https://www.piwheels.org/simple/kiwisolver/kiwisolver-1.1.0-cp35-cp35m-linux_armv7l.whl (912kB)
100% |████████████████████████████████| 921kB 344kB/s
Collecting pyparsing!=2.0.4,!=2.1.2,!=2.1.6,>=2.0.1 (from matplotlib->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/11/fa/0160cd525c62d7abd076a070ff02b2b94de589f1a9789774f17d7c54058e/pyparsing-2.4.2-py2.py3-none-any.whl (65kB)
100% |████████████████████████████████| 71kB 2.1MB/s
Collecting python-dateutil>=2.1 (from matplotlib->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/41/17/c62faccbfbd163c7f57f3844689e3a78bae1f403648a6afb1d0866d87fbb/python_dateutil-2.8.0-py2.py3-none-any.whl (226kB)
100% |████████████████████████████████| 235kB 1.2MB/s
Collecting cycler>=0.10 (from matplotlib->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/f7/d2/e07d3ebb2bd7af696440ce7e754c59dd546ffe1bbe732c8ab68b9c834e61/cycler-0.10.0-py2.py3-none-any.whl
Collecting coverage>=4.4 (from pytest-cov->-r requirements.txt (line 10))
Downloading https://www.piwheels.org/simple/coverage/coverage-4.5.4-cp35-cp35m-linux_armv7l.whl (210kB)
100% |████████████████████████████████| 215kB 538kB/s
Requirement already satisfied: six in /usr/lib/python3/dist-packages (from pathlib2>=2.2.0; python_version < "3.6"->pytest->-r requirements.txt (line 4))
Collecting zipp>=0.5 (from importlib-metadata>=0.12; python_version < "3.8"->pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/74/3d/1ee25a26411ba0401b43c6376d2316a71addcc72ef8690b101b4ea56d76a/zipp-0.6.0-py2.py3-none-any.whl
Requirement already satisfied: setuptools in /usr/lib/python3/dist-packages (from kiwisolver>=1.0.1->matplotlib->-r requirements.txt (line 6))
Installing collected packages: opencv-python, pathlib2, pyparsing, packaging, atomicwrites, more-itertools, zipp, importlib-metadata, pluggy, py, attrs, wcwidth, pytest, kiwisolver, python-dateutil, cycler, matplotlib, scipy, coverage, pytest-cov, python-chess
Successfully installed atomicwrites-1.3.0 attrs-19.3.0 coverage-4.5.4 cycler-0.10.0 importlib-metadata-0.23 kiwisolver-1.1.0 matplotlib-3.0.3 more-itertools-7.2.0 opencv-python-3.4.4.19 packaging-19.2 pathlib2-2.3.5 pluggy-0.13.0 py-1.8.0 pyparsing-2.4.2 pytest-5.2.1 pytest-cov-2.8.1 python-chess-0.28.3 python-dateutil-2.8.0 scipy-1.3.1 wcwidth-0.1.7 zipp-0.6.0
Test
if you run into the ImportError: libcblas.so.3: cannot open shared object file: No such file or directory error you might want to run both lines otherwise simply try the test script itself
pip3 install opencv-python; sudo apt-get install -y libcblas-dev libhdf5-dev libhdf5-serial-dev libatlas-base-dev libjasper-dev libqtgui4 libqt4-test
run tests
scripts/test
...
ImportError: numpy.core.multiarray failed to import
The issue is that this project needs Python3.7 to work which can only be installed manually by compiling on stretch at this time (which i didn't try out ...)
Windows 7/10
- Download Python 3.7.3 from https://www.python.org/downloads/release/python-373/
Alternative: Install via Linux Subsystem
This installation uses a "hybrid approach" - we install the web elements e.g. javascript/css/fonts via bash script and then use the Windows native python and pip to proceed.
- see https://docs.microsoft.com/de-de/windows/wsl/install-win10 with Ubuntu from the Microsoft Store
then follow the linux instructions
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install xdg-utils
Access files via Z:
cd pcwawc
pip install -r requirements.txt
cd ..
set PYTHONPATH=.;%PYTHONPATH%;