Ultrasonic Sensor: Difference between revisions
Jump to navigation
Jump to search
(Created page with "1200px") |
No edit summary |
||
| (8 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
[[File:Ultrasonic_IMG_3078.JPG| | see also | ||
* https://leanpub.com/rpcultra/read | |||
* https://pimylifeup.com/raspberry-pi-distance-sensor/ | |||
* https://tutorials-raspberrypi.de/entfernung-messen-mit-ultraschallsensor-hc-sr04/ | |||
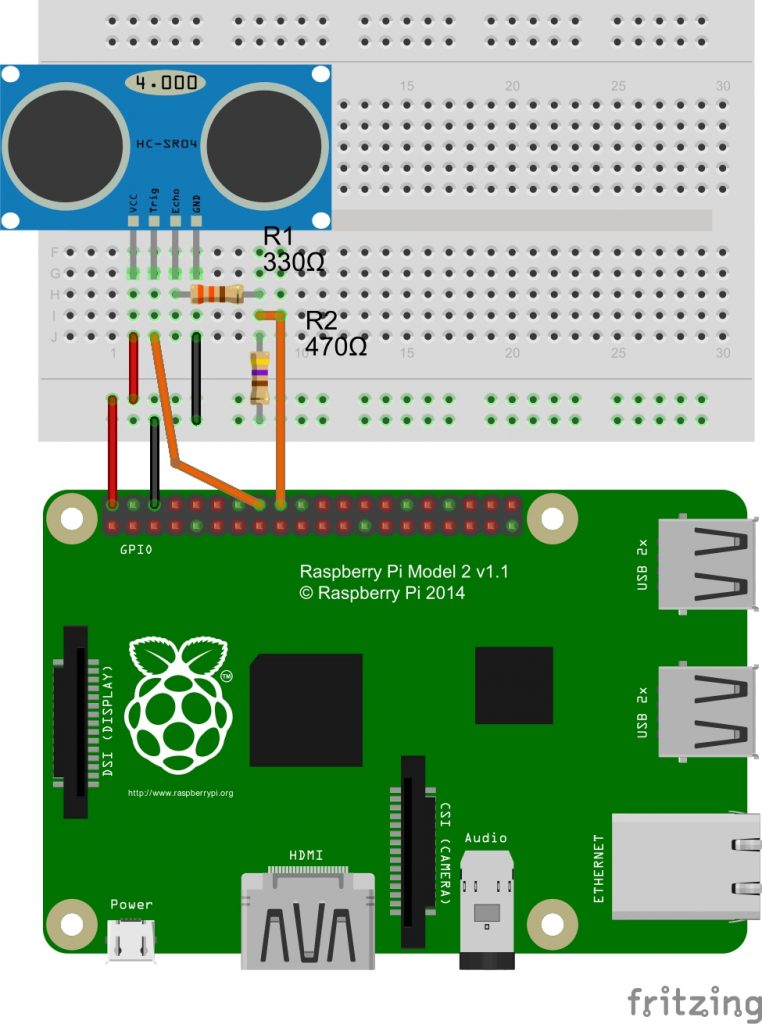
= Wiring = | |||
https://www.einplatinencomputer.com/wp-content/uploads/2016/02/hc-sr04_Steckplatine-762x1024.jpg | |||
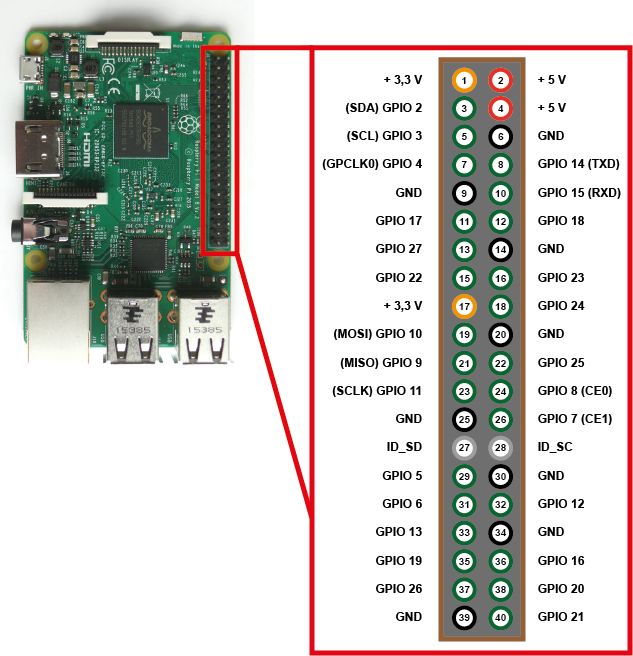
https://www.elektronik-kompendium.de/sites/raspberry-pi/fotos/raspberry-pi-15b.jpg | |||
[[File:Ultrasonic_IMG_3078.JPG|900px]] | |||
= Python Source Code = | |||
Please note that the source code is using GPIO 14/15 which is different from the wiring above ... | |||
<source lang='python'> | |||
# WF 2019-06-11 | |||
# Distance Measuring with HC-SR04 Ultrasonic Sensor | |||
# | |||
# You need to modify the GPIO_TRIGGER and GPIO_ECHO settings | |||
# according to your setup for this code to work properly. | |||
# Needed Libraries | |||
import RPi.GPIO as GPIO | |||
import time | |||
#GPIO Modus (BOARD / BCM) | |||
GPIO.setmode(GPIO.BCM) | |||
#GPIO Pins to be used | |||
GPIO_TRIGGER = 15 | |||
GPIO_ECHO = 14 | |||
# set direction of GPIO pins (IN / OUT) | |||
GPIO.setup(GPIO_TRIGGER, GPIO.OUT) | |||
GPIO.setup(GPIO_ECHO, GPIO.IN) | |||
def distance(): | |||
# set Trigger to HIGH | |||
GPIO.output(GPIO_TRIGGER, True) | |||
# set Trigger to Low after 0.01ms | |||
time.sleep(0.00001) | |||
GPIO.output(GPIO_TRIGGER, False) | |||
InitTime = time.time() | |||
TriggerTime = time.time() | |||
# Sound travels 6 m in 1/40 of a second the | |||
# HC-SR04 can measure up to some 3m only so 6m is the maximum echo | |||
# travel distance | |||
MaxTime = 1/40.0; | |||
EchoTime = time.time() | |||
# wait for trigger and set time | |||
while GPIO.input(GPIO_ECHO) == 0: | |||
TriggerTime = time.time() | |||
if TriggerTime-InitTime > MaxTime: | |||
break; | |||
# wait for echo and set time | |||
while GPIO.input(GPIO_ECHO) == 1: | |||
EchoTime = time.time() | |||
if EchoTime-TriggerTime > MaxTime: | |||
break; | |||
# calc time difference between trigger and echo | |||
TimeElapsed = EchoTime - TriggerTime | |||
# multiply by speed fo sound (34300 cm/s) | |||
# and divide by two (sound went back and forth) | |||
distance = (TimeElapsed * 34300) / 2 | |||
return distance | |||
if __name__ == '__main__': | |||
try: | |||
print("Starting ultrasound distance measurement ...") | |||
while True: | |||
dist = distance() | |||
if dist <-300: | |||
print ("GPIO_ECHO %d does not go low" %GPIO_ECHO) | |||
else: | |||
if dist <= 300: | |||
print ("distance = %.1f cm" % dist) | |||
else: | |||
print ("distance = ?"); | |||
time.sleep(1) | |||
# on CTRL-C reset GPIO | |||
except KeyboardInterrupt: | |||
print("Aborted ultrasound distance measurement by User ... cleaning up GPIO") | |||
GPIO.cleanup() | |||
</source> | |||
[[Category:Raspberry]] | |||
Latest revision as of 09:49, 25 February 2020
see also
- https://leanpub.com/rpcultra/read
- https://pimylifeup.com/raspberry-pi-distance-sensor/
- https://tutorials-raspberrypi.de/entfernung-messen-mit-ultraschallsensor-hc-sr04/
Wiring
https://www.einplatinencomputer.com/wp-content/uploads/2016/02/hc-sr04_Steckplatine-762x1024.jpg
https://www.elektronik-kompendium.de/sites/raspberry-pi/fotos/raspberry-pi-15b.jpg

{kind=link}
{kind=link}
Python Source Code
Please note that the source code is using GPIO 14/15 which is different from the wiring above ...
# WF 2019-06-11
# Distance Measuring with HC-SR04 Ultrasonic Sensor
#
# You need to modify the GPIO_TRIGGER and GPIO_ECHO settings
# according to your setup for this code to work properly.
# Needed Libraries
import RPi.GPIO as GPIO
import time
#GPIO Modus (BOARD / BCM)
GPIO.setmode(GPIO.BCM)
#GPIO Pins to be used
GPIO_TRIGGER = 15
GPIO_ECHO = 14
# set direction of GPIO pins (IN / OUT)
GPIO.setup(GPIO_TRIGGER, GPIO.OUT)
GPIO.setup(GPIO_ECHO, GPIO.IN)
def distance():
# set Trigger to HIGH
GPIO.output(GPIO_TRIGGER, True)
# set Trigger to Low after 0.01ms
time.sleep(0.00001)
GPIO.output(GPIO_TRIGGER, False)
InitTime = time.time()
TriggerTime = time.time()
# Sound travels 6 m in 1/40 of a second the
# HC-SR04 can measure up to some 3m only so 6m is the maximum echo
# travel distance
MaxTime = 1/40.0;
EchoTime = time.time()
# wait for trigger and set time
while GPIO.input(GPIO_ECHO) == 0:
TriggerTime = time.time()
if TriggerTime-InitTime > MaxTime:
break;
# wait for echo and set time
while GPIO.input(GPIO_ECHO) == 1:
EchoTime = time.time()
if EchoTime-TriggerTime > MaxTime:
break;
# calc time difference between trigger and echo
TimeElapsed = EchoTime - TriggerTime
# multiply by speed fo sound (34300 cm/s)
# and divide by two (sound went back and forth)
distance = (TimeElapsed * 34300) / 2
return distance
if __name__ == '__main__':
try:
print("Starting ultrasound distance measurement ...")
while True:
dist = distance()
if dist <-300:
print ("GPIO_ECHO %d does not go low" %GPIO_ECHO)
else:
if dist <= 300:
print ("distance = %.1f cm" % dist)
else:
print ("distance = ?");
time.sleep(1)
# on CTRL-C reset GPIO
except KeyboardInterrupt:
print("Aborted ultrasound distance measurement by User ... cleaning up GPIO")
GPIO.cleanup()