PlayChessWithAWebCam: Difference between revisions
| Line 187: | Line 187: | ||
=== Code Structure === | === Code Structure === | ||
<uml> | <uml> | ||
hide circle | hide circle | ||
class | note top of GameEngine: This class is used to change the game state using StateClass. | ||
class GameEngine { | |||
__init__(argv) | |||
mainLoop() | |||
play() | |||
} | |||
note top of Field: a single Field of a chessboard as observed from a WebCam. | |||
class Field { | |||
hsv255_to_rgb255(h,s,v) | |||
__init__(row,col) | |||
hsv_to_rgb(h,s,v) | |||
analyzeColor(hsv,distance=1,step=1) | |||
} | |||
note top of InputManager: manage the video input and supply frames. | |||
class InputManager { | |||
__init__(argv) | |||
getFrame() | |||
} | |||
class RejectedMove { | |||
__init__(value) | |||
__str__() | |||
} | |||
RejectedMove --|> Exception | |||
note top of Board: This class is used to hold the state of a chessboard with pieces positions and the current player's color which player needs to play. It uses the python-chess library by default | |||
class Board { | |||
fen() | |||
setPgn(pgn) | |||
GetCellName(col,row) | |||
__init__(dominatorOffset=(0,-1)) | |||
performMove(move) | |||
unicode() | |||
pgn() | |||
} | |||
class Cell { | |||
__repr__() | |||
__init__(coords) | |||
GetCoords() | |||
} | |||
note top of Warp: holds the trapezoid points to be use for warping an image take from a peculiar angle. | |||
class Warp { | |||
rotate(angle) | |||
addPoint(px,py) | |||
__init__(rotation=0,bgrColor=(0,255,0)) | |||
} | |||
note top of WebApp: actual Play Chess with a WebCam Application - Flask calls are routed here. | |||
class WebApp { | |||
photo(path) | |||
genVideo(video) | |||
chessPgn(pgn,fen) | |||
genVideoStreamed(video) | |||
chessForward() | |||
videoFeed() | |||
videoPause() | |||
__init__(args,warpPointBGRColor=(0,255,0)) | |||
chessWebCamClick(x,y,w,h) | |||
index(msg) | |||
download(path,filename) | |||
warpAndRotate(image) | |||
chessTakeback() | |||
chessDebug() | |||
videoRotate90() | |||
home() | |||
} | |||
note top of YamlAbleMixin: allow reading and writing derived objects from a yaml file. | |||
class YamlAbleMixin { | |||
writeYaml(name) | |||
readYaml(name) | |||
} | |||
class BadSegmentation { | |||
} | |||
BadSegmentation --|> Exception | |||
class BoardFinder { | |||
getBlackMaxSide(colorImage) | |||
setSide(side) | |||
__init__(inImage) | |||
calibrateCornerMarker(dotImage) | |||
rotateImage(image) | |||
GetFullImageBoard(rectCoordinates=None,rotations=None) | |||
prepare() | |||
DetectBoardOrientation() | |||
getDominatorOffset() | |||
GetChessBoardCoordinates(rotation) | |||
updateImage(inFrame) | |||
} | |||
class BadImage { | |||
__init__(value) | |||
__str__() | |||
} | |||
BadImage --|> Exception | BadImage --|> Exception | ||
class | note top of MovementDetector: This class used to detect if a move has occured in the board. | ||
class MovementDetector { | |||
_getMovements() | |||
detectMove(colorImage) | |||
__init__(colorImage) | |||
_changeState(newBoard,newImage) | |||
} | |||
class ArenaQuit { | |||
} | |||
ArenaQuit --|> Exception | |||
note top of Uci: This class interacts with stdin and stdout with Arena in the UCI. | |||
class Uci { | |||
_setPosition(tokens) | |||
getResponse() | |||
sendMove(move) | |||
} | |||
note top of JsonAbleMixin: allow reading and writing derived objects from a json file. | |||
class JsonAbleMixin { | |||
writeJson(name,postfix=".json") | |||
readJson(name,postfix=".json") | |||
} | |||
note top of RunningStats: calculate mean, variance and standard deviation in one pass using Welfford's algorithm. | |||
class RunningStats { | |||
variance() | |||
__init__() | |||
standard_deviation() | |||
clear() | |||
mean() | |||
push(xvalue) | |||
} | |||
class | note top of ColorStats: calculate the RunningStats for 3 color channels like RGB or HSV simultaneously. | ||
class ColorStats { | |||
push(c1,c2,c3) | |||
colorKey() | |||
variance() | |||
__init__() | |||
distance(this,other) | |||
square(value) | |||
standard_deviation() | |||
mean() | |||
} | |||
note top of WebChessCamArgs: This class parses command line arguments and generates a usage. | |||
note top of | class WebChessCamArgs { | ||
class | chessWebCamClick(width,height) | ||
__init__(argv) | |||
chessPgn() | |||
chessMove(move) | |||
chessForward() | |||
download(filename) | |||
video_pause() | |||
video_feed() | |||
chessTakeback() | |||
chessDebug() | |||
root() | |||
photo() | |||
videoRotate90() | |||
home() | |||
} | } | ||
note top of FPSCheck: Frame per second tracker. | |||
class FPSCheck { | |||
fps() | |||
__init__() | |||
start() | |||
elapsed() | |||
update() | |||
} | } | ||
class | |||
class UserExit { | |||
} | } | ||
UserExit --|> Exception | |||
note top of ChessCam: Chess Camera get next move by analyzing movements. | note top of ChessCam: Chess Camera get next move by analyzing movements. | ||
class ChessCam { | class ChessCam { | ||
__init__() | |||
analyzeFrame() | |||
playChessWithCam(args) | |||
prepare(argv) | |||
getNextMove() | |||
getDominatorOffset() | |||
detectMovement() | |||
} | playChessWithCamMoves() | ||
} | |||
note top of Args: This class parses command line arguments and generates a usage. | |||
class Args { | |||
__init__(args) | |||
} | |||
class CannotBuildStateException { | |||
__init__(value) | |||
__str__() | |||
} | } | ||
CannotBuildStateException --|> Exception | |||
class StateDetector { | class StateDetector { | ||
_divideInCells() | _divideInCells() | ||
| Line 268: | Line 412: | ||
} | } | ||
note top of Video: Video handling e.g. recording/writing | |||
class Video { | class Video { | ||
record(prefix,printHints=True) | record(prefix,printHints=True) | ||
imencode(frame,format=".jpg") | |||
pause(ispaused) | |||
addTimeStamp(frame,withFrames=True,withFPS=True,fontBGRColor=(0,255,0),fontScale=1.2,font=cv2.FONT_HERSHEY_SIMPLEX,lineThickness=2) | |||
rotate(image,angle,center=None,scale=1.0) | |||
open(filePath) | open(filePath) | ||
drawLines(image,lines) | drawLines(image,lines) | ||
houghTransform(image) | houghTransform(image) | ||
timeStamp(separator='',timeseparator='') | |||
is_int(s) | |||
checkFilePath(filePath,raiseException=True) | checkFilePath(filePath,raiseException=True) | ||
__init__() | |||
sumIntensity(image) | sumIntensity(image) | ||
readFrame(show=False) | drawTrapezoid(image,points,color) | ||
readFrame(show=False,postProcess=None) | |||
drawCircle(image,center,radius=10,color=(0,255,0),thickness=1) | |||
readJpgImage(show=False,postProcess=None) | |||
getSubRect(image,rect) | getSubRect(image,rect) | ||
drawRectangle(image,pt1,pt2,color=(0,255,0),thickness=1) | |||
play() | play() | ||
setup(cap) | setup(cap) | ||
warp(image,pts,squared=True) | |||
fileTimeStamp() | |||
showImage(image,title,keyCheck=True,keyWait=5) | showImage(image,title,keyCheck=True,keyWait=5) | ||
still(prefix,format="jpg",close=True,printHints=True,show=False,postProcess=None) | |||
checkCap() | checkCap() | ||
capture(device) | capture(device) | ||
createBlank(width,height,rgb_color) | houghTransformP(image) | ||
createBlank(width,height,rgb_color=(0,0,0)) | |||
still2File(filename,format="jpg",close=True,printHints=True,show=False,postProcess=None) | |||
close() | close() | ||
paused() | |||
readImage(filePath) | readImage(filePath) | ||
} | } | ||
note top of VideoStream: run videograbbing in separate stream. | |||
class VideoStream { | |||
stop() | |||
read() | |||
start() | |||
__init__(video,show=False,postProcess=None,name='VideoStream') | |||
update() | |||
} | |||
note top of BoardDetector: detect a chess board's state from the given image. | |||
class BoardDetector { | |||
note top of | __init__(board,video) | ||
analyze(image,distance=3,step=1) | |||
} | |||
</uml> | </uml> | ||
| Line 318: | Line 472: | ||
[[Category:Raspberry]] | [[Category:Raspberry]] | ||
[[Category:Chess]] | [[Category:Chess]] | ||
= OS-Support = | = OS-Support = | ||
== MacOS High Sierra 10.13.6 == | == MacOS High Sierra 10.13.6 == | ||
Revision as of 07:54, 27 October 2019
| OsProject | |
|---|---|
| id | PlayChessWithAWebCam |
| state | |
| owner | Wolfgang Fahl |
| title | Play Chess With A WebCam |
| url | https://github.com/WolfgangFahl/play-chess-with-a-webcam |
| version | 0.0.1 |
| description | |
| date | 2019/10/21 |
| since | |
| until | |
Motivation
See MagneticSensorChessBoard1987 for the initial project of 1987. Time has moved on and the goals of the 1987 project can be achieved with less hardware and software in a more convenient manner these days.
State of Project
As of 2019-10-27 version 0.0.1 has not been released yet. The state of the project is development/alpha.
There is already a lof of stuff to try out and to participate in this open source project.
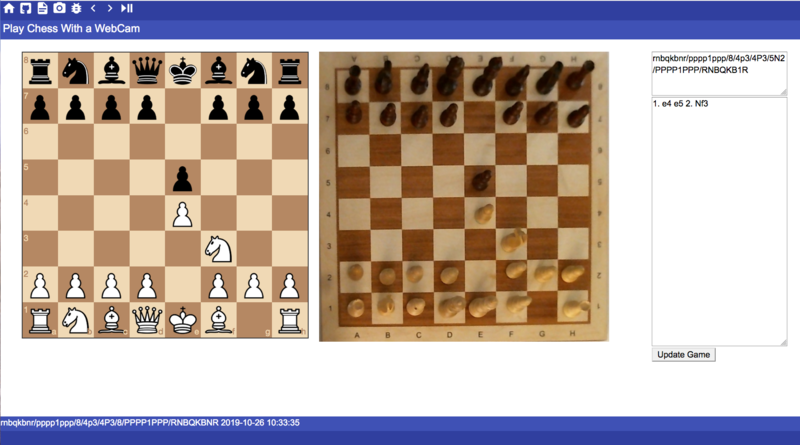
There is a web frontend which you can try out e.g. with:
scripts/runweb --input testMedia/scholarsmate.avi
or
scripts/runweb
for the default web cam or
scripts/runweb --input 1
if there is a second one installed.
You migh want to click the corners of your chessboard to try out the warp function.
The scripts:
- still
- record
are already useful for taking pictures and movie recordings of your chess match. The detection of the board and moves is not fully operational yet.
If you'd like to experiment a bit you can run the tests which will show some debug output.
opencv tutorial stuff
Also in the opencvtutoral directory you'll find:
- colorcluster.py
- histogramm.py
- hough_lines.py
hough lines
python3 opencvtutorial/hough_lines.py testMedia/chessBoard002.jpg



histogramm / colorcluster

python3 opencvtutorial/histogramm.py testMedia/chessBoard006.jpg

python3 opencvtutorial/colorcluster.py testMedia/chessBoard006.jpg
Clusterization took 2.8 s for 1 channels
Clusterization took 4.5 s for 2 channels
Clusterization took 6.7 s for 3 channels

Installation
Prerequisites: python3.7 (install script will check and try automatic installation in Ubuntu/MacOS)
git clone https://github.com/WolfgangFahl/play-chess-with-a-webcam
Cloning into 'play-chess-with-a-webcam'...
remote: Enumerating objects: 57, done.
remote: Counting objects: 100% (57/57), done.
remote: Compressing objects: 100% (40/40), done.
remote: Total 385 (delta 29), reused 34 (delta 17), pack-reused 328
Receiving objects: 100% (385/385), 1.79 MiB | 3.17 MiB/s, done.
Resolving deltas: 100% (244/244), done
cd play-chess-with-a-webcam
scripts/install
checking that python3 is installed on os Linux ...
/usr/bin/python3
checking that pip3 is installed on os Linux ...
installing pip3 from apt-package python3-pip
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following package was automatically installed and is no longer required:
libevent-core-2.1-6
Use 'sudo apt autoremove' to remove it.
The following additional packages will be installed:
libexpat1-dev libpython3-dev libpython3.6-dev python-pip-whl python3-dev
python3-setuptools python3-wheel python3.6-dev
Suggested packages:
python-setuptools-doc
The following NEW packages will be installed:
libexpat1-dev libpython3-dev libpython3.6-dev python-pip-whl python3-dev
python3-pip python3-setuptools python3-wheel python3.6-dev
0 upgraded, 9 newly installed, 0 to remove and 40 not upgraded.
Need to get 47,5 MB of archives.
After this operation, 81,7 MB of additional disk space will be used.
Do you want to continue? [Y/n] y
Usage
Command line usage
scripts/run -h
usage: ChessCam.py [-h] [--nouci] [--input INPUT] [--debug]
[--cornermarker CORNERMARKER] [--fullScreen]
ChessCam Argument Parser
optional arguments:
-h, --help show this help message and exit
--nouci Don't use the UCI interface.
--input INPUT Manually set the input device.
--debug show debug output
--cornermarker CORNERMARKER
filepath for an image of the cornermarker being used
--fullScreen Display output in fullScreen mode
Recording
Still images
scripts/still
Video of match
scripts/record
Testing
scripts/test
============================= test session starts =============================
platform darwin -- Python 3.7.4, pytest-5.2.1, py-1.8.0, pluggy-0.12.0
rootdir: /Users/wf/source/python/play-chess-with-a-webcam
plugins: cov-2.8.1
collected 11 items
src/test_Board.py . [ 9%]
src/test_ChessCam.py . [ 18%]
src/test_OpenCV_version.py . [ 27%]
src/test_Video.py ... [ 54%]
src/test_findBoard.py ..... [100%]
---------- coverage: platform darwin, python 3.7.4-final-0 -----------
Name Stmts Miss Cover
------------------------------------------------
src/Args.py 10 7 30%
src/Board.py 33 3 91%
src/BoardFinder.py 186 12 94%
src/Cell.py 10 4 60%
src/ChessCam.py 86 59 31%
src/InputManager.py 57 37 35%
src/MovementDetector.py 55 40 27%
src/StateDetector.py 92 75 18%
src/Video.py 133 48 64%
src/mathUtils.py 49 25 49%
src/test_Board.py 23 3 87%
src/test_ChessCam.py 4 0 100%
src/test_OpenCV_version.py 6 0 100%
src/test_Video.py 28 0 100%
src/test_findBoard.py 49 0 100%
------------------------------------------------
TOTAL 821 313 62%
============================= 11 passed in 25.18s =============================
Hardware
see e.g Raspberry_PI_Chessboard_Camera
Source Code
play-chess-with-a-webcam
see github fork at
Written in python2 migrated to python3.7. see https://unix.stackexchange.com/a/410851/38701 for selection your python version on Ubuntu
Code Structure

OS-Support
MacOS High Sierra 10.13.6
MacPorts: 2.6.2
Install
scripts/install
checking that python3 is installed on os Darwin ...
/opt/local/bin/python3
checking that pip3 is installed on os Darwin ...
/opt/local/bin/pip3
Requirement already satisfied: opencv-python in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from -r requirements.txt (line 2)) (4.1.1.26)
Requirement already satisfied: pytest in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from -r requirements.txt (line 4)) (5.2.1)
Collecting matplotlib (from -r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/c3/8b/af9e0984f5c0df06d3fab0bf396eb09cbf05f8452de4e9502b182f59c33b/matplotlib-3.1.1-cp37-cp37m-macosx_10_6_intel.macosx_10_9_intel.macosx_10_9_x86_64.macosx_10_10_intel.macosx_10_10_x86_64.whl (14.4MB)
|████████████████████████████████| 14.4MB 7.4MB/s
Collecting scipy (from -r requirements.txt (line 8))
Downloading https://files.pythonhosted.org/packages/d5/06/1a696649f4b2e706c509cb9333fdc6331fbe71251cede945f9e1fa13ea34/scipy-1.3.1-cp37-cp37m-macosx_10_6_intel.macosx_10_9_intel.macosx_10_9_x86_64.macosx_10_10_intel.macosx_10_10_x86_64.whl (27.7MB)
|████████████████████████████████| 27.7MB 7.1MB/s
Collecting pytest-cov (from -r requirements.txt (line 10))
Downloading https://files.pythonhosted.org/packages/b9/54/3673ee8be482f81527678ac894276223b9814bb7262e4f730469bb7bf70e/pytest_cov-2.8.1-py2.py3-none-any.whl
Collecting python-chess (from -r requirements.txt (line 12))
Downloading https://files.pythonhosted.org/packages/58/70/72dc875a30ac7f26e0bec45714d67b19e0f498de920323b906995a741a88/python_chess-0.28.3-py3-none-any.whl (127kB)
|████████████████████████████████| 133kB 7.1MB/s
Requirement already satisfied: numpy>=1.14.5 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from opencv-python->-r requirements.txt (line 2)) (1.16.4)
Requirement already satisfied: attrs>=17.4.0 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (19.1.0)
Requirement already satisfied: more-itertools>=4.0.0 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (7.2.0)
Requirement already satisfied: py>=1.5.0 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (1.8.0)
Requirement already satisfied: pluggy<1.0,>=0.12 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (0.13.0)
Requirement already satisfied: atomicwrites>=1.0 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (1.3.0)
Requirement already satisfied: wcwidth in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (0.1.7)
Requirement already satisfied: importlib-metadata>=0.12; python_version < "3.8" in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (0.23)
Requirement already satisfied: packaging in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from pytest->-r requirements.txt (line 4)) (19.2)
Collecting kiwisolver>=1.0.1 (from matplotlib->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/df/93/8bc9b52a8846be2b9572aa0a7c881930939b06e4abe1162da6a0430b794f/kiwisolver-1.1.0-cp37-cp37m-macosx_10_6_intel.macosx_10_9_intel.macosx_10_9_x86_64.macosx_10_10_intel.macosx_10_10_x86_64.whl (113kB)
|████████████████████████████████| 122kB 8.3MB/s
Requirement already satisfied: pyparsing!=2.0.4,!=2.1.2,!=2.1.6,>=2.0.1 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from matplotlib->-r requirements.txt (line 6)) (2.4.2)
Requirement already satisfied: python-dateutil>=2.1 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from matplotlib->-r requirements.txt (line 6)) (2.8.0)
Collecting cycler>=0.10 (from matplotlib->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/f7/d2/e07d3ebb2bd7af696440ce7e754c59dd546ffe1bbe732c8ab68b9c834e61/cycler-0.10.0-py2.py3-none-any.whl
Collecting coverage>=4.4 (from pytest-cov->-r requirements.txt (line 10))
Downloading https://files.pythonhosted.org/packages/93/07/8302163cdbe2008441aa69f2119750110fde15ffd8a56a687311b143365a/coverage-4.5.4-cp37-cp37m-macosx_10_13_x86_64.whl (181kB)
|████████████████████████████████| 184kB 8.4MB/s
Requirement already satisfied: zipp>=0.5 in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from importlib-metadata>=0.12; python_version < "3.8"->pytest->-r requirements.txt (line 4)) (0.6.0)
Requirement already satisfied: six in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from packaging->pytest->-r requirements.txt (line 4)) (1.12.0)
Requirement already satisfied: setuptools in /opt/local/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages (from kiwisolver>=1.0.1->matplotlib->-r requirements.txt (line 6)) (41.0.1)
Installing collected packages: kiwisolver, cycler, matplotlib, scipy, coverage, pytest-cov, python-chess
Successfully installed coverage-4.5.4 cycler-0.10.0 kiwisolver-1.1.0 matplotlib-3.1.1 pytest-cov-2.8.1 python-chess-0.28.3 scipy-1.3.1
Test
scripts/test
=========================================== test session starts ===========================================
platform darwin -- Python 3.7.3, pytest-5.2.1, py-1.8.0, pluggy-0.13.0
rootdir: /Users/wf/source/python/play-chess-with-a-webcam
plugins: cov-2.8.1
collected 11 items
src/test_Board.py . [ 9%]
src/test_ChessCam.py . [ 18%]
src/test_OpenCV_version.py . [ 27%]
src/test_Video.py ... [ 54%]
src/test_findBoard.py ..... [100%]
---------- coverage: platform darwin, python 3.7.3-final-0 -----------
Name Stmts Miss Cover
------------------------------------------------
src/Args.py 10 7 30%
src/Board.py 33 3 91%
src/BoardFinder.py 186 12 94%
src/Cell.py 10 4 60%
src/ChessCam.py 86 59 31%
src/InputManager.py 57 37 35%
src/MovementDetector.py 55 40 27%
src/StateDetector.py 92 75 18%
src/Video.py 133 48 64%
src/mathUtils.py 49 25 49%
src/test_Board.py 23 3 87%
src/test_ChessCam.py 4 0 100%
src/test_OpenCV_version.py 6 0 100%
src/test_Video.py 28 0 100%
src/test_findBoard.py 49 0 100%
------------------------------------------------
TOTAL 821 313 62%
=========================================== 11 passed in 37.60s ===========================================
Ubuntu 18.04.3 LTS bionic beaver
Install
scripts/install
checking that python3 is installed on os Linux ...
/usr/bin/python3
checking that pip3 is installed on os Linux ...
installing pip3 from apt-package python3-pip
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following package was automatically installed and is no longer required:
libevent-core-2.1-6
Use 'sudo apt autoremove' to remove it.
The following additional packages will be installed:
libexpat1-dev libpython3-dev libpython3.6-dev python-pip-whl python3-dev
python3-setuptools python3-wheel python3.6-dev
Suggested packages:
python-setuptools-doc
The following NEW packages will be installed:
libexpat1-dev libpython3-dev libpython3.6-dev python-pip-whl python3-dev
python3-pip python3-setuptools python3-wheel python3.6-dev
0 upgraded, 9 newly installed, 0 to remove and 40 not upgraded.
Need to get 47,5 MB of archives.
After this operation, 81,7 MB of additional disk space will be used.
Do you want to continue? [Y/n] y
Get:1 http://de.archive.ubuntu.com/ubuntu bionic-updates/main amd64 libexpat1-dev amd64 2.2.5-3ubuntu0.2 [122 kB]
Get:2 http://de.archive.ubuntu.com/ubuntu bionic-updates/main amd64 libpython3.6-dev amd64 3.6.8-1~18.04.3 [44,8 MB]
Get:3 http://de.archive.ubuntu.com/ubuntu bionic-updates/main amd64 libpython3-dev amd64 3.6.7-1~18.04 [7.328 B]
Get:4 http://de.archive.ubuntu.com/ubuntu bionic-updates/universe amd64 python-pip-whl all 9.0.1-2.3~ubuntu1.18.04.1 [1.653 kB]
Get:5 http://de.archive.ubuntu.com/ubuntu bionic-updates/main amd64 python3.6-dev amd64 3.6.8-1~18.04.3 [508 kB]
Get:6 http://de.archive.ubuntu.com/ubuntu bionic-updates/main amd64 python3-dev amd64 3.6.7-1~18.04 [1.288 B]
Get:7 http://de.archive.ubuntu.com/ubuntu bionic-updates/universe amd64 python3-pip all 9.0.1-2.3~ubuntu1.18.04.1 [114 kB]
Get:8 http://de.archive.ubuntu.com/ubuntu bionic/main amd64 python3-setuptools all 39.0.1-2 [248 kB]
Get:9 http://de.archive.ubuntu.com/ubuntu bionic/universe amd64 python3-wheel all 0.30.0-0.2 [36,5 kB]
Fetched 47,5 MB in 7s (7.072 kB/s)
Selecting previously unselected package libexpat1-dev:amd64.
(Reading database ... 198536 files and directories currently installed.)
Preparing to unpack .../0-libexpat1-dev_2.2.5-3ubuntu0.2_amd64.deb ...
Unpacking libexpat1-dev:amd64 (2.2.5-3ubuntu0.2) ...
Selecting previously unselected package libpython3.6-dev:amd64.
Preparing to unpack .../1-libpython3.6-dev_3.6.8-1~18.04.3_amd64.deb ...
Unpacking libpython3.6-dev:amd64 (3.6.8-1~18.04.3) ...
Selecting previously unselected package libpython3-dev:amd64.
Preparing to unpack .../2-libpython3-dev_3.6.7-1~18.04_amd64.deb ...
Unpacking libpython3-dev:amd64 (3.6.7-1~18.04) ...
Selecting previously unselected package python-pip-whl.
Preparing to unpack .../3-python-pip-whl_9.0.1-2.3~ubuntu1.18.04.1_all.deb ...
Unpacking python-pip-whl (9.0.1-2.3~ubuntu1.18.04.1) ...
Selecting previously unselected package python3.6-dev.
Preparing to unpack .../4-python3.6-dev_3.6.8-1~18.04.3_amd64.deb ...
Unpacking python3.6-dev (3.6.8-1~18.04.3) ...
Selecting previously unselected package python3-dev.
Preparing to unpack .../5-python3-dev_3.6.7-1~18.04_amd64.deb ...
Unpacking python3-dev (3.6.7-1~18.04) ...
Selecting previously unselected package python3-pip.
Preparing to unpack .../6-python3-pip_9.0.1-2.3~ubuntu1.18.04.1_all.deb ...
Unpacking python3-pip (9.0.1-2.3~ubuntu1.18.04.1) ...
Selecting previously unselected package python3-setuptools.
Preparing to unpack .../7-python3-setuptools_39.0.1-2_all.deb ...
Unpacking python3-setuptools (39.0.1-2) ...
Selecting previously unselected package python3-wheel.
Preparing to unpack .../8-python3-wheel_0.30.0-0.2_all.deb ...
Unpacking python3-wheel (0.30.0-0.2) ...
Setting up python-pip-whl (9.0.1-2.3~ubuntu1.18.04.1) ...
Setting up python3-wheel (0.30.0-0.2) ...
Setting up python3-pip (9.0.1-2.3~ubuntu1.18.04.1) ...
Setting up libexpat1-dev:amd64 (2.2.5-3ubuntu0.2) ...
Setting up python3-setuptools (39.0.1-2) ...
Setting up libpython3.6-dev:amd64 (3.6.8-1~18.04.3) ...
Setting up python3.6-dev (3.6.8-1~18.04.3) ...
Setting up libpython3-dev:amd64 (3.6.7-1~18.04) ...
Setting up python3-dev (3.6.7-1~18.04) ...
Processing triggers for man-db (2.8.3-2ubuntu0.1) ...
Processing triggers for doc-base (0.10.8) ...
Processing 1 added doc-base file...
Collecting opencv-python (from -r requirements.txt (line 2))
Downloading https://files.pythonhosted.org/packages/5e/7e/bd5425f4dacb73367fddc71388a47c1ea570839197c2bcad86478e565186/opencv_python-4.1.1.26-cp36-cp36m-manylinux1_x86_64.whl (28.7MB)
100% |████████████████████████████████| 28.7MB 30kB/s
Collecting pytest (from -r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/0c/91/d68f68ce54cd3e8afa1ef73ea1ad44df2438521b64c0820e5fd9b9f13b7d/pytest-5.2.1-py3-none-any.whl (226kB)
100% |████████████████████████████████| 235kB 2.5MB/s
Collecting matplotlib (from -r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/57/4f/dd381ecf6c6ab9bcdaa8ea912e866dedc6e696756156d8ecc087e20817e2/matplotlib-3.1.1-cp36-cp36m-manylinux1_x86_64.whl (13.1MB)
100% |████████████████████████████████| 13.1MB 69kB/s
Collecting scipy (from -r requirements.txt (line 8))
Downloading https://files.pythonhosted.org/packages/29/50/a552a5aff252ae915f522e44642bb49a7b7b31677f9580cfd11bcc869976/scipy-1.3.1-cp36-cp36m-manylinux1_x86_64.whl (25.2MB)
100% |████████████████████████████████| 25.2MB 34kB/s
Collecting pytest-cov (from -r requirements.txt (line 10))
Downloading https://files.pythonhosted.org/packages/b9/54/3673ee8be482f81527678ac894276223b9814bb7262e4f730469bb7bf70e/pytest_cov-2.8.1-py2.py3-none-any.whl
Collecting python-chess (from -r requirements.txt (line 12))
Downloading https://files.pythonhosted.org/packages/58/70/72dc875a30ac7f26e0bec45714d67b19e0f498de920323b906995a741a88/python_chess-0.28.3-py3-none-any.whl (127kB)
100% |████████████████████████████████| 133kB 3.5MB/s
Collecting numpy>=1.11.3 (from opencv-python->-r requirements.txt (line 2))
Downloading https://files.pythonhosted.org/packages/0e/46/ae6773894f7eacf53308086287897ec568eac9768918d913d5b9d366c5db/numpy-1.17.3-cp36-cp36m-manylinux1_x86_64.whl (20.0MB)
100% |████████████████████████████████| 20.0MB 45kB/s
Collecting pluggy<1.0,>=0.12 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/92/c7/48439f7d5fd6bddb4c04b850bb862b42e3e2b98570040dfaf68aedd8114b/pluggy-0.13.0-py2.py3-none-any.whl
Collecting atomicwrites>=1.0 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/52/90/6155aa926f43f2b2a22b01be7241be3bfd1ceaf7d0b3267213e8127d41f4/atomicwrites-1.3.0-py2.py3-none-any.whl
Collecting packaging (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/cf/94/9672c2d4b126e74c4496c6b3c58a8b51d6419267be9e70660ba23374c875/packaging-19.2-py2.py3-none-any.whl
Collecting wcwidth (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/7e/9f/526a6947247599b084ee5232e4f9190a38f398d7300d866af3ab571a5bfe/wcwidth-0.1.7-py2.py3-none-any.whl
Collecting importlib-metadata>=0.12; python_version < "3.8" (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/f6/d2/40b3fa882147719744e6aa50ac39cf7a22a913cbcba86a0371176c425a3b/importlib_metadata-0.23-py2.py3-none-any.whl
Collecting attrs>=17.4.0 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/a2/db/4313ab3be961f7a763066401fb77f7748373b6094076ae2bda2806988af6/attrs-19.3.0-py2.py3-none-any.whl
Collecting py>=1.5.0 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/76/bc/394ad449851729244a97857ee14d7cba61ddb268dce3db538ba2f2ba1f0f/py-1.8.0-py2.py3-none-any.whl (83kB)
100% |████████████████████████████████| 92kB 4.4MB/s
Collecting more-itertools>=4.0.0 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/45/dc/3241eef99eb45f1def35cf93af35d1cf9ef4c0991792583b8f33ea41b092/more_itertools-7.2.0-py3-none-any.whl (57kB)
100% |████████████████████████████████| 61kB 4.8MB/s
Requirement already satisfied: pyparsing!=2.0.4,!=2.1.2,!=2.1.6,>=2.0.1 in /usr/lib/python3/dist-packages (from matplotlib->-r requirements.txt (line 6))
Requirement already satisfied: python-dateutil>=2.1 in /usr/lib/python3/dist-packages (from matplotlib->-r requirements.txt (line 6))
Collecting kiwisolver>=1.0.1 (from matplotlib->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/f8/a1/5742b56282449b1c0968197f63eae486eca2c35dcd334bab75ad524e0de1/kiwisolver-1.1.0-cp36-cp36m-manylinux1_x86_64.whl (90kB)
100% |████████████████████████████████| 92kB 5.2MB/s
Collecting cycler>=0.10 (from matplotlib->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/f7/d2/e07d3ebb2bd7af696440ce7e754c59dd546ffe1bbe732c8ab68b9c834e61/cycler-0.10.0-py2.py3-none-any.whl
Collecting coverage>=4.4 (from pytest-cov->-r requirements.txt (line 10))
Downloading https://files.pythonhosted.org/packages/51/b1/13609068fff1c8c056f0c4601ad6985cf5c1bbfc529196ab08bd2a57dc39/coverage-4.5.4-cp36-cp36m-manylinux1_x86_64.whl (205kB)
100% |████████████████████████████████| 215kB 2.8MB/s
Requirement already satisfied: six in /usr/lib/python3/dist-packages (from packaging->pytest->-r requirements.txt (line 4))
Collecting zipp>=0.5 (from importlib-metadata>=0.12; python_version < "3.8"->pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/74/3d/1ee25a26411ba0401b43c6376d2316a71addcc72ef8690b101b4ea56d76a/zipp-0.6.0-py2.py3-none-any.whl
Requirement already satisfied: setuptools in /usr/lib/python3/dist-packages (from kiwisolver>=1.0.1->matplotlib->-r requirements.txt (line 6))
Installing collected packages: numpy, opencv-python, more-itertools, zipp, importlib-metadata, pluggy, atomicwrites, packaging, wcwidth, attrs, py, pytest, kiwisolver, cycler, matplotlib, scipy, coverage, pytest-cov, python-chess
Successfully installed atomicwrites-1.3.0 attrs-19.3.0 coverage-4.5.4 cycler-0.10.0 importlib-metadata-0.23 kiwisolver-1.1.0 matplotlib-3.1.1 more-itertools-7.2.0 numpy-1.17.3 opencv-python-4.1.1.26 packaging-19.2 pluggy-0.13.0 py-1.8.0 pytest-5.2.1 pytest-cov-2.8.1 python-chess-0.28.3 scipy-1.3.1 wcwidth-0.1.7 zipp-0.6.0
Test
scripts/test
============================= test session starts =============================
platform linux -- Python 3.6.8, pytest-5.2.1, py-1.8.0, pluggy-0.13.0
rootdir: /home/wf/source/python/play-chess-with-a-webcam
plugins: cov-2.8.1
collected 11 items
src/test_Board.py . [ 9%]
src/test_ChessCam.py . [ 18%]
src/test_OpenCV_version.py . [ 27%]
src/test_Video.py ... [ 54%]
src/test_findBoard.py ..... [100%]
----------- coverage: platform linux, python 3.6.8-final-0 -----------
Name Stmts Miss Cover
------------------------------------------------
src/Args.py 10 7 30%
src/Board.py 33 3 91%
src/BoardFinder.py 186 12 94%
src/Cell.py 10 4 60%
src/ChessCam.py 86 59 31%
src/InputManager.py 57 37 35%
src/MovementDetector.py 55 40 27%
src/StateDetector.py 92 75 18%
src/Video.py 133 48 64%
src/mathUtils.py 49 25 49%
src/test_Board.py 23 3 87%
src/test_ChessCam.py 4 0 100%
src/test_OpenCV_version.py 6 0 100%
src/test_Video.py 28 0 100%
src/test_findBoard.py 49 0 100%
------------------------------------------------
TOTAL 821 313 62%
============================= 11 passed in 32.41s =============================
Rapspbian 9.8 stretch
Install
if the install fails e.g. with an Exception in urlopen you might want to restart the install.
scripts/install
checking that python3 is installed on os Linux ...
/usr/bin/python3
checking that pip3 is installed on os Linux ...
/usr/bin/pip3
Collecting opencv-python (from -r requirements.txt (line 2))
Using cached https://www.piwheels.org/simple/opencv-python/opencv_python-3.4.4.19-cp35-cp35m-linux_armv7l.whl
Collecting pytest (from -r requirements.txt (line 4))
Using cached https://files.pythonhosted.org/packages/0c/91/d68f68ce54cd3e8afa1ef73ea1ad44df2438521b64c0820e5fd9b9f13b7d/pytest-5.2.1-py3-none-any.whl
Collecting matplotlib (from -r requirements.txt (line 6))
Using cached https://www.piwheels.org/simple/matplotlib/matplotlib-3.0.3-cp35-cp35m-linux_armv7l.whl
Collecting scipy (from -r requirements.txt (line 8))
Using cached https://www.piwheels.org/simple/scipy/scipy-1.3.1-cp35-cp35m-linux_armv7l.whl
Collecting pytest-cov (from -r requirements.txt (line 10))
Using cached https://files.pythonhosted.org/packages/b9/54/3673ee8be482f81527678ac894276223b9814bb7262e4f730469bb7bf70e/pytest_cov-2.8.1-py2.py3-none-any.whl
Collecting python-chess (from -r requirements.txt (line 12))
Using cached https://files.pythonhosted.org/packages/58/70/72dc875a30ac7f26e0bec45714d67b19e0f498de920323b906995a741a88/python_chess-0.28.3-py3-none-any.whl
Requirement already satisfied: numpy>=1.12.1 in /usr/lib/python3/dist-packages (from opencv-python->-r requirements.txt (line 2))
Collecting pathlib2>=2.2.0; python_version < "3.6" (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/e9/45/9c82d3666af4ef9f221cbb954e1d77ddbb513faf552aea6df5f37f1a4859/pathlib2-2.3.5-py2.py3-none-any.whl
Collecting packaging (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/cf/94/9672c2d4b126e74c4496c6b3c58a8b51d6419267be9e70660ba23374c875/packaging-19.2-py2.py3-none-any.whl
Collecting atomicwrites>=1.0 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/52/90/6155aa926f43f2b2a22b01be7241be3bfd1ceaf7d0b3267213e8127d41f4/atomicwrites-1.3.0-py2.py3-none-any.whl
Collecting pluggy<1.0,>=0.12 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/92/c7/48439f7d5fd6bddb4c04b850bb862b42e3e2b98570040dfaf68aedd8114b/pluggy-0.13.0-py2.py3-none-any.whl
Collecting py>=1.5.0 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/76/bc/394ad449851729244a97857ee14d7cba61ddb268dce3db538ba2f2ba1f0f/py-1.8.0-py2.py3-none-any.whl (83kB)
100% |████████████████████████████████| 92kB 2.1MB/s
Collecting importlib-metadata>=0.12; python_version < "3.8" (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/f6/d2/40b3fa882147719744e6aa50ac39cf7a22a913cbcba86a0371176c425a3b/importlib_metadata-0.23-py2.py3-none-any.whl
Collecting attrs>=17.4.0 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/a2/db/4313ab3be961f7a763066401fb77f7748373b6094076ae2bda2806988af6/attrs-19.3.0-py2.py3-none-any.whl
Collecting wcwidth (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/7e/9f/526a6947247599b084ee5232e4f9190a38f398d7300d866af3ab571a5bfe/wcwidth-0.1.7-py2.py3-none-any.whl
Collecting more-itertools>=4.0.0 (from pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/45/dc/3241eef99eb45f1def35cf93af35d1cf9ef4c0991792583b8f33ea41b092/more_itertools-7.2.0-py3-none-any.whl (57kB)
100% |████████████████████████████████| 61kB 2.0MB/s
Collecting kiwisolver>=1.0.1 (from matplotlib->-r requirements.txt (line 6))
Downloading https://www.piwheels.org/simple/kiwisolver/kiwisolver-1.1.0-cp35-cp35m-linux_armv7l.whl (912kB)
100% |████████████████████████████████| 921kB 344kB/s
Collecting pyparsing!=2.0.4,!=2.1.2,!=2.1.6,>=2.0.1 (from matplotlib->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/11/fa/0160cd525c62d7abd076a070ff02b2b94de589f1a9789774f17d7c54058e/pyparsing-2.4.2-py2.py3-none-any.whl (65kB)
100% |████████████████████████████████| 71kB 2.1MB/s
Collecting python-dateutil>=2.1 (from matplotlib->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/41/17/c62faccbfbd163c7f57f3844689e3a78bae1f403648a6afb1d0866d87fbb/python_dateutil-2.8.0-py2.py3-none-any.whl (226kB)
100% |████████████████████████████████| 235kB 1.2MB/s
Collecting cycler>=0.10 (from matplotlib->-r requirements.txt (line 6))
Downloading https://files.pythonhosted.org/packages/f7/d2/e07d3ebb2bd7af696440ce7e754c59dd546ffe1bbe732c8ab68b9c834e61/cycler-0.10.0-py2.py3-none-any.whl
Collecting coverage>=4.4 (from pytest-cov->-r requirements.txt (line 10))
Downloading https://www.piwheels.org/simple/coverage/coverage-4.5.4-cp35-cp35m-linux_armv7l.whl (210kB)
100% |████████████████████████████████| 215kB 538kB/s
Requirement already satisfied: six in /usr/lib/python3/dist-packages (from pathlib2>=2.2.0; python_version < "3.6"->pytest->-r requirements.txt (line 4))
Collecting zipp>=0.5 (from importlib-metadata>=0.12; python_version < "3.8"->pytest->-r requirements.txt (line 4))
Downloading https://files.pythonhosted.org/packages/74/3d/1ee25a26411ba0401b43c6376d2316a71addcc72ef8690b101b4ea56d76a/zipp-0.6.0-py2.py3-none-any.whl
Requirement already satisfied: setuptools in /usr/lib/python3/dist-packages (from kiwisolver>=1.0.1->matplotlib->-r requirements.txt (line 6))
Installing collected packages: opencv-python, pathlib2, pyparsing, packaging, atomicwrites, more-itertools, zipp, importlib-metadata, pluggy, py, attrs, wcwidth, pytest, kiwisolver, python-dateutil, cycler, matplotlib, scipy, coverage, pytest-cov, python-chess
Successfully installed atomicwrites-1.3.0 attrs-19.3.0 coverage-4.5.4 cycler-0.10.0 importlib-metadata-0.23 kiwisolver-1.1.0 matplotlib-3.0.3 more-itertools-7.2.0 opencv-python-3.4.4.19 packaging-19.2 pathlib2-2.3.5 pluggy-0.13.0 py-1.8.0 pyparsing-2.4.2 pytest-5.2.1 pytest-cov-2.8.1 python-chess-0.28.3 python-dateutil-2.8.0 scipy-1.3.1 wcwidth-0.1.7 zipp-0.6.0
Test
if you run into the ImportError: libcblas.so.3: cannot open shared object file: No such file or directory error you might want to run both lines otherwise simply try the test script itself
pip3 install opencv-python; sudo apt-get install -y libcblas-dev libhdf5-dev libhdf5-serial-dev libatlas-base-dev libjasper-dev libqtgui4 libqt4-test
run tests
scripts/test
...
ImportError: numpy.core.multiarray failed to import
The issue is that this project needs Python3.7 to work which can only be installed manually by compiling on stretch at this time (which i didn't try out ...)