Ultrasonic Sensor
Jump to navigation
Jump to search
The printable version is no longer supported and may have rendering errors. Please update your browser bookmarks and please use the default browser print function instead.
see also
- https://leanpub.com/rpcultra/read
- https://pimylifeup.com/raspberry-pi-distance-sensor/
- https://tutorials-raspberrypi.de/entfernung-messen-mit-ultraschallsensor-hc-sr04/
Wiring
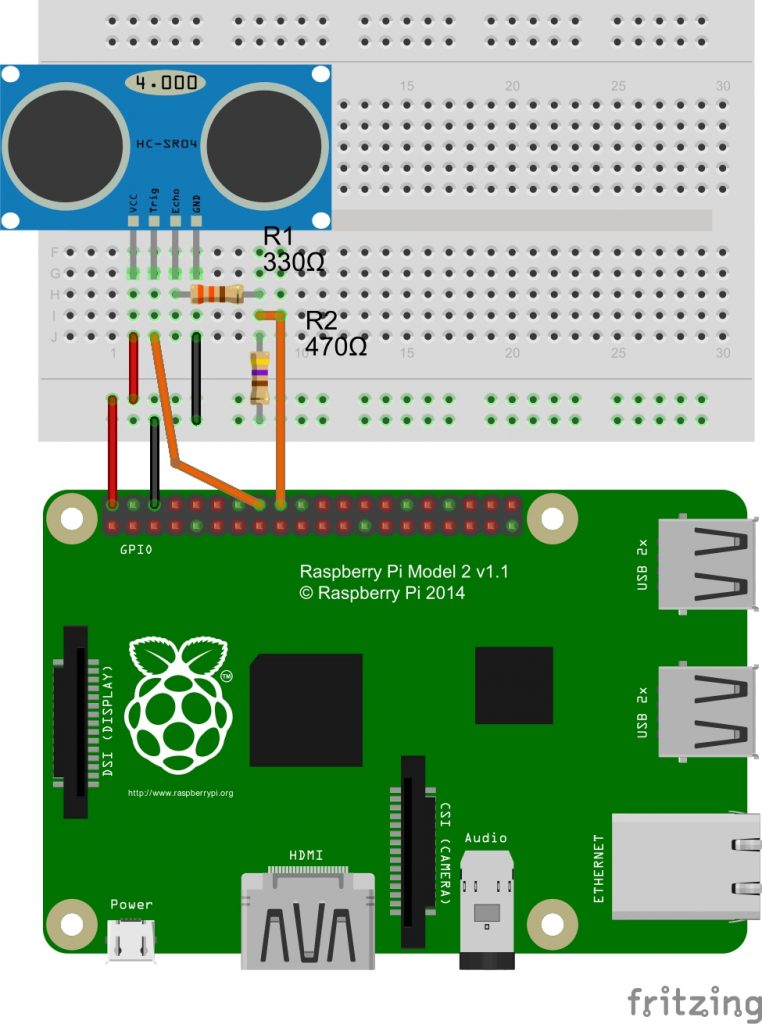

Python Source Code
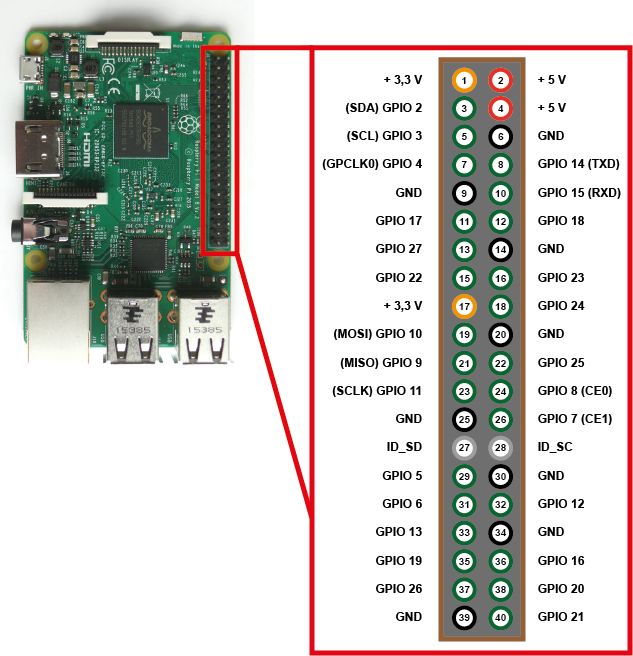
Please note that the source code is using GPIO 14/15 which is different from the wiring above ...
# WF 2019-06-11
# Distance Measuring with HC-SR04 Ultrasonic Sensor
#
# You need to modify the GPIO_TRIGGER and GPIO_ECHO settings
# according to your setup for this code to work properly.
# Needed Libraries
import RPi.GPIO as GPIO
import time
#GPIO Modus (BOARD / BCM)
GPIO.setmode(GPIO.BCM)
#GPIO Pins to be used
GPIO_TRIGGER = 15
GPIO_ECHO = 14
# set direction of GPIO pins (IN / OUT)
GPIO.setup(GPIO_TRIGGER, GPIO.OUT)
GPIO.setup(GPIO_ECHO, GPIO.IN)
def distance():
# set Trigger to HIGH
GPIO.output(GPIO_TRIGGER, True)
# set Trigger to Low after 0.01ms
time.sleep(0.00001)
GPIO.output(GPIO_TRIGGER, False)
InitTime = time.time()
TriggerTime = time.time()
# Sound travels 6 m in 1/40 of a second the
# HC-SR04 can measure up to some 3m only so 6m is the maximum echo
# travel distance
MaxTime = 1/40.0;
EchoTime = time.time()
# wait for trigger and set time
while GPIO.input(GPIO_ECHO) == 0:
TriggerTime = time.time()
if TriggerTime-InitTime > MaxTime:
break;
# wait for echo and set time
while GPIO.input(GPIO_ECHO) == 1:
EchoTime = time.time()
if EchoTime-TriggerTime > MaxTime:
break;
# calc time difference between trigger and echo
TimeElapsed = EchoTime - TriggerTime
# multiply by speed fo sound (34300 cm/s)
# and divide by two (sound went back and forth)
distance = (TimeElapsed * 34300) / 2
return distance
if __name__ == '__main__':
try:
print("Starting ultrasound distance measurement ...")
while True:
dist = distance()
if dist <-300:
print ("GPIO_ECHO %d does not go low" %GPIO_ECHO)
else:
if dist <= 300:
print ("distance = %.1f cm" % dist)
else:
print ("distance = ?");
time.sleep(1)
# on CTRL-C reset GPIO
except KeyboardInterrupt:
print("Aborted ultrasound distance measurement by User ... cleaning up GPIO")
GPIO.cleanup()